Интегральные критерии качества регулирования
Недостатки простейщих интегральных критериев качества могут быть в значительной степени компенсированы, если они применяются не изолировано, а совместно с оценками качества регулирования по степени колебательности m. При таком сочетании критериев качества отпадает также необходимость в вычислении степени устойчивости h, так как достаточно большое ее значение гарантируется минимумом используемой интегральной оценки [1].
Пусть  .
.
Связь перехода с m: 
уравнение первого порядка, решение которого имеет вид.

Заданная экспонента носит название экстремали.
8. Критерий обобщенной работы [10]

t0, tk - соответственно начальный и конечный момент времени , V зад, Q и L - заданные функции указанных аргументов.
V зад - определяет вклад в функционал конечного (в момент времени tk) состояния объекта.
Часто в задачах момент окончания процесса tk не назначается заранее. В этом случае удобно пользоваться скользящим интервалом оптимизации

t - текущий момент времени, Т - заданная длительность интервала времени оптимизации управляемого движения, член  – это терминальный член функционала I0.
– это терминальный член функционала I0.
При аналитическом конструировании регуляторов необходимо, чтобы третий член в функционале I0 являлся квадратичным относительно вектора управления u, т.е. подинтегральная функция имеет вид:
 , где
, где
К(t) - некоторая положительно неопределенная невыраженная матрица характеризующая "свободу" выбора управления в Um .
|
|
|
9. Частный критерий обобщенной работы [11]
Позволяет вводить дополнительные ограничения, связанные с возможностью непосредственного влияния на степень деипфирсвания.
Если значение r мало, то малая величина  может быть получена при весьма большой величине
может быть получена при весьма большой величине  .
.
Чем больше весовой коэффициент r, тем меньше изменяется входной сигнал и больше станивится ошибка управления, т.е. система управления становится более инерционной.
5. Оценки функционирования недетермированных систем [12]
1. Статистические критерии
1.1. Среднеквадратичное отклонение  :
:
 , где
, где
x(t) - центрированная реализация процесса, Т - интервал времени наблюдения. Эта оценка тем точнее, чем больше Т.
 , где
, где  - спектральная плотность случайного сигнала G(t),
- спектральная плотность случайного сигнала G(t),  - модуль комплексной частотной характеристики системы получаемой из зависимости:
- модуль комплексной частотной характеристики системы получаемой из зависимости:  , путем замены р на
, путем замены р на 
где  - оценка корреляционной функции, которая может быть найдена по формуле:
- оценка корреляционной функции, которая может быть найдена по формуле:
1.2. Квадратичный критерий качества [11]
 , где
, где
 - ошибка управления,
- ошибка управления,  - отклонение управляемой переменной от математического ожидания
- отклонение управляемой переменной от математического ожидания  ; r - коэффициент.
; r - коэффициент.
|
|
|
В критерии соотносятся свойства среднего квадрата ошибки
управления:  и средней входной мощности:
и средней входной мощности: 
2. Минимаксные критерии точности систем управления [12J
Существо их состоит в том, что качество работы системы осуществляется в экспериментальных, наиболее тяжелых ситуациях.
Задача состоит в том, чтобы среди всех реализаций найти наиболее тяжелую и опасную для систем)!. Затем ориентируясь на эту форму реализации производят синтез системы.
Дисперсия ошибки управления вычисляется аналогичным образом:
 ,
,
где  - спектр мощности f(t).
- спектр мощности f(t).
Величина минимаксного квадратичного интегрального критерия вычисляется по формуле:
 ,
,
где f 0 - максимально возможное значение ступенчатого изменения f(t).
6. Требования к качеству управления динамическими объектами
6.1. Приведем общие требования (рекомендации), которых желательно придерживаться при выборе расположения полюсов и нулей передаточных функций [13].
1. Желательно располагать нули вблизи области расположения полюсов. Удаление нулей от области полюсов ведет к увеличинению амплитуд собственных колебаний в переходном процессе.
2. Для уменьшения отклонений в переходном процессе часто бывает выгодно удалять полюсы друг от друга.
|
|
|
3. Приближение друг к другу не представляет опасности для тех полюсов, которые расположены далеко от мнимой оси.
6.2. В настоящее время существует три способа формулировки требований, предъявляемых к протеканию переходного процесса [6]
1. Первый способ заключается в задании некоторых допустимых пределов для показателей переходного процесса, либо в задании качественных характеристик кривой y(t) (  ). Например, можно потребовать, чтобы время переходного процесса
). Например, можно потребовать, чтобы время переходного процесса  было меньше некоторой предельно допустимой величины
было меньше некоторой предельно допустимой величины  . Можно потребовать чтобы переход
. Можно потребовать чтобы переход  вовсе отсутствовал, либо был меньше некоторого максимума
вовсе отсутствовал, либо был меньше некоторого максимума  . Можно потребовать, чтобы процесс был монотонным. Все подробные требования относятся к сложной кривой x(t) без привлечения каких-либо других кривых для сравнения.
. Можно потребовать, чтобы процесс был монотонным. Все подробные требования относятся к сложной кривой x(t) без привлечения каких-либо других кривых для сравнения.
Указанный способ формулировки не всегда удобен из-за следующих причин:
а) 3атруднительность вычисления показателей переходного процесса: времени tp, величины перехода Dx, s%.
б) Величина  является сложной функцией параметров системы, обладающей даже разрывами первого рода, причем эта прерывность не имеет физической связи с динамическими свойствами системы, а связана с условностью выбора порога D допустимого отклонения .
является сложной функцией параметров системы, обладающей даже разрывами первого рода, причем эта прерывность не имеет физической связи с динамическими свойствами системы, а связана с условностью выбора порога D допустимого отклонения .
|
|
|
в) Само задание допустимых значений T0 и Dx еще не определяет все важные черты переходного процесса.
г) Показатели переходного процесса существенно зависят от начальных условий y(t), а следовательно, от характера внешнего воздействия на систему. Если требуется удовлетворить определенным требованиям при нескольких таких воздействий, то для каждого из них необходимо отдельно найти показатели переходного процесса. В этом случае громоздкость вычислений еще более возрастает.
2. При втором способе формулировки требований к переходному процессу задаются не какими-либо отдельными показателями переходного процесса x(t), а требуют близости кривой x(t) к некоторой заданной кривой x *(t), которая считается допустимой или благоприятной, либо требуют близости к одной из семейства кривых. Как и в первом, так и во втором способе формулировки требований часто остается в тени весьма важный вопрос: почему именно данные показатели tp, Dx либо данные типы кривых x *(t) являются в том или ином конкретном случае допустимыми.
Эти способы формулировки оказываются совсем неподходящими, если требуется выжать из системы максимум того, что она может дать. В этом случае улучшение показателей переходного процесса ограничивается в конечном итоге тем, что ряд координат системы или их функции не могут выйти за определенные предельные значения:
 (*)
(*)
где Ai, Bi - заданные величины.
3. При третьем способе формулировки требуется, чтобы какой-либо показатель или критерий переходного процесса принимал экстремальное значение (например, процесс заканчивается как можно быстрее) при условии соблюдения условий (*).
При формулировке требований должны быть заданы определенные начальные условия, либо некоторая область начальных условий, а также класс задающих, либо возмущающих воздействий, приложенных к системе.
Этот способ формулировки требований наилучшим образом соответствует тем естественным ограничениям показателей, характеризующих переходный процесс, которые имеются в конкретных системах. Он является наиболее приемлемым и часто единственно возможным при разработке оптимальных систем.
Единственный точный теоретический подход изучения всех деталей кривой переходного процесса состоит в вычислении этой кривой и построение графика у(t).
3: Чаще требует решить активную задачу - так подобрать параметры системы, чтобы удовлетворить предъявленным требованиям.
Нередко система заранее вообще не задана и требуется создать такую (ее часть) систему, чтобы предъявляемые к ней требования удовлетворялись.
3 : Если регулируемый объект задан, то желаемое (оптимальное в данных конкретных условиях) качество процесса регулирования достигается выбором типа регулятора, рациональным размещением его чувствительных элементов и регулирующих органов в объекте и правильной настройкой регулятора, учитывает динамические особенности объекта и регулятора [1].
Основные затруднения, возникающие при решении вопроса о выборе оптимальной настройки регулятора в сложных промышленных САУ состоит в том, что, как правило повышение степени устойчивости и степени колебательности процессов может быть достигнуто только за счет снижения скорости регулирования т.е. за счет увеличения динамической и статической погрешностей процесса. Поскольку затухание процесса является первостепенным критерием качества процесса регулирования (это диктуется условиями надлежащей надежности работы промышленной установки), то под оптимальной настройкой автоматического регулятора понимается обычно настройка, обеспечивающая заданные значения степени колебательности и степени устойчивости процесса при минимально возможных значениях остальных критериев качества [1].
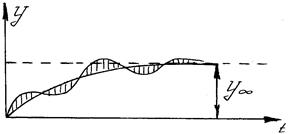
3: Всякое возмущенное движение имеет вид:
 , где
, где
 : частное решение уравнения с правой частью (установившее состояние)
: частное решение уравнения с правой частью (установившее состояние)
 : общее решение уравнения без правой части (переходная или свободная составляющая).
: общее решение уравнения без правой части (переходная или свободная составляющая).
Поэтому в интегральных критериях используется величина  . А для оценки установившегося процесса
. А для оценки установившегося процесса  служат критерии другого типа
служат критерии другого типа
7. Комбинированные критерии (алгоритмическая реализация) [6]
Допустим, что требуется подобрать такой вектор x, чтобы функция Q 1(x) была минимальна,  . Последние неравенства ограничивают в пространстве вектора х некоторую допустимую область, за пределы которой нельзя входить. Однако формально можно устранить ограничения, применив критерий:
. Последние неравенства ограничивают в пространстве вектора х некоторую допустимую область, за пределы которой нельзя входить. Однако формально можно устранить ограничения, применив критерий:
 , (*)
, (*)
где
Если число  достаточно велико, то точка минимума функции Q либо совпадает с минимумом Q 1, если последний находится в допустимой области.
достаточно велико, то точка минимума функции Q либо совпадает с минимумом Q 1, если последний находится в допустимой области.
Можно избежать больших значений коэффициентов, если заменить форцулу (х) следующей:
 ,
,
где  ,
,
Литература
1. Дудников Е.Г. "Основы автоматического регулирования тепловых процессов". М: ГЭИ, 1956 г. 264 с.
2. "Основы автоматического регулирования. Теория", под редакцией В. В. Солодовникова М : Машгиз, 1954 г.
3. Айзерман М.А. "Теория автоматического регулирования двигателей". ГТТИ, 1952 г.
4. Бесекерский В.А., Попов Е.П. "Теория систем автоматического регулирования". М: "Наука", 1975 г. 524 с.
5. Справочное пособие по теории систем автоматического регулирования и управления / под ред. Е.А. Санковекого, "Вышейшая школа", Минск, 1973 г.
6. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. М: "Наука", 1971 г. 446 с.
7. Марков С.И., Минаев В.М., Артомонов Б.Н. Идентификация параметров колебательных CAP. Л: "Энергия" 1975 г.
8. Юсупов P.M. Получение информации об управляемом процессе в самонастраивающихся системах М-Л.: "Энергия", 1966 г.
9. Дж. И. Гибсон. Системы самооптимиэации или самонастраивающиеся системы автоматического регулирования. В кн: Труды. 1 -го конгресса ИФАК, 1960 г. т 2, с. 745-770. М: Изд АН СССР 1961 г.
10. Буков В.Н. "Адаптивные прогнозирующие системы управления полетом". М.: Наука, 1987 г. 232 с.
11. Р. Изерман. "Цифровые системы управления" .М: "Мир", 1984, 541 с.
12. Автоматизация настройки систем управления / под редакцией В. Я. Ромача, М: Энергоатомиздат, 1984 г., 272 с.
13. Попов Е.П. Динамика систем автоматического регулирования. ГИГГЛ, 1954 г.
Дата добавления: 2019-07-17; просмотров: 199; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!