Корегування слідкуючої системи
Корегування САК здійснюємо за допомогою пасивної диференційної ланки
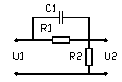
Рис. 6. - Передавальна функція ланки має вигляд:
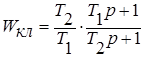
де Т1 = R1×C1 = 65×103×10×10-6 = 0,65 c
T 2= R1×C1×R2/(R1 + R2) = 0,65×50×103/(65+50)×103 = 0,283 c.
G 0 = T2/T1= 0,283/0,65 = 0,435
У структурній схемі корегуючу ланку ставимо після електронного підсилювача і перед тиристорним перетворювачем.
Передавальні функції окремих елементів корегованої системи
1) Передавальна функція розімкненої системи:

2) Передавальна функція замкненої системи відносно завдання:

3) Передавальна функція для похибки замкненої системи:

5) Передавальна функція замкненої системи відносно збурення:

Усталена похибка корегованої системи
Визначимо граничний коефіцієнт підсилення скорегованої системи.
Запишемо характеристичне рівняння скорегованої САК:
ТмТп Т2р4+((Тм+Тп) × Т2+ТмТп )р3+(Тм+Тп+Т2)·р2+(1+KG0T1)p+КG0 = 0
0,00 1132 р4 + 0, 12 р3 +0, 693 р2 + (1+0,2 83 K)р + 0, 435 K = 0
Для стійкості необхідно виконання двох умов :
· Правило Стодоли: щоб усі три корені були додатніми, ця умова виконується.
· Критерій Гурвіца: для кубічного рівняння а3 × (а1×а2–а0×а3)–а12× а4 > 0
а0 = 0,001132 а1 = 0,12 а2 = 0,693 а3 = 1+ 0,283K а4 = 0,435K
Маємо квадратну нерівність К2 – 184,4·К – 911,1 = 0
Знаходимо корені К1 = 189,2;К2 = -4,8.
Вибираємо К = 189
З умови, що запас стійкості має лежати в межах 2¸3 коефіцієнт підсилення дорівнює
К = Кг/2,5 = 189/2,5 = 75,6
Приймаємо К = 75
Тоді коефіцієнт електронного підсилювача дорівнює:
Кгр = 75/0,21 = 357,14
Усталена похибка слідкуючої системи дорівнює:

Де a0 , f0 – усталені значення завдання і збурення відповідно.
Оскільки ми не маємо даних стосовно збурю вальної дії Мс то ми нехтуємо другим доданком. Отже усталена похибка нашої САК дорівнює:

Логарифмічні характеристики розімкненої корегованої системи.
Логарифмічно-частотні характеристики розімкненої корегованої системи.
Передавальна функція розімкненої корегованої системи має вигляд:

ЛАЧХ будуємо за допомогою спряжених частот
w1 = 1/Т1 = 1/0,65 = 1,54 с-1;w2 = 1/Т2 = 1/0,283 = 3,53 с-1;
w3 = 1/Тм = 1/0,4 = 2,5 с-1;w4 = 1/Тп = 1/0,01 = 100 с-1;
w Î [0, w1] – пряма лінія з нахилом –20 (дб/дек);
w Î [w1, w2] – пряма лінія без нахилу;
w Î [w2, w3] – пряма лінія з нахилом –20 (дб/дек);
w Î [w3, w4] – пряма лінія з нахилом –40 (дб/дек);
w Î [w4, ¥] – пряма лінія з нахилом –60 (дб/дек);
ЛАЧХ корегованої системи:
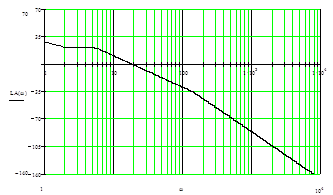
Рис. 7. ЛАЧХ розімкненої корегованої системи.
ЛФЧХ системи складається з трьох складових j = j1 + j2 + j3 + j4.
j1 = -arctg(1/0) = -90°;
j2 = -arctg(0,17×w);
j3 = -arctg(0,008×w)

Тоді маємо j(w)=  – 90° – arctg(0,4×w) – arctg(0,01×w);
– 90° – arctg(0,4×w) – arctg(0,01×w);
По одержаним залежностям будуємо графік.

Рис. 8. ЛФЧХ розімкненої корегованої системи.
Перехідна функція замкненої корегованої системи
Передавальна функція замкненої корегованої системи має вигляд:

де G0 = T2/T1= 0,283/0,65 = 0,435
Маємо a = 1/р тоді

Підставивши числові значення одержимо

Запишемо характеристичне рівняння системи:
0 ,00 1132 р4 + 0, 12 р3 + 0, 693 р2 + 2 2 , 22 р + 3 2 , 62 = 0
За допомогою ЕОМ знаходимо корені рівняння (19):
р1 = –101,9;
р2 = –2,175 – 23,961j = 24,06·e85°j;
р3 = –2,175 + 23,961j = 24,06·e-85°j;
р4 = –1,746.
Далі для знаходження оригіналу h(t) скористаємося другою теоремою Хевісайда , суть якої в наступному : якщо зображення F(p) функції f(t) має вигляд
 ;
;
то її оригінал дорівнює 
де pk – корені характеристичного рівняння.
В нашому випадку F1(p) = 32,6·(0,65р + 1);
F2(p) = 0,001132р4 + 0,12р3 + 0,693р2 + 22,22р + 32,62;
F’2(р) = 0,00453р3 + 0,36р2 + 1,386р + 22,22.
Знайдемо значення F’2(рк) , де pk – корені характеристичного рівняння.
F’2(р1)=0,001108(–130)3 + 0,1131 (-130)2 + 0,764 (–130) + 21,4 = -600,8
F’2(р2)=0,001108(–2,175 – 23,961j)3 + 0,1131 (–2,175 – 23,961j)2 + 0,764 · ·(–2,175 – 23,961j) +21,4 = -40,521+8,348j = 41,372e-11,6°j
F’2(р3)=0,001108(–2,175 + 23,961j)3 + 0,1131 (–2,175 + 23,961j)2 + 0,764 · ·(–2,175 + 23,961j) + 21,4 = -40,521-8,348j = 41,372e11,6°j
F’2(р4)=0,001108(–1,746)3+0,1131(–1,746)2 + 0,764 (–1,746) + 21,4=20,405
F1(0) = 36,4F2(0) = 36.4
F1(р1) = 36,4·(0,56 (–130) + 1) = -2614
F1(р2) = 36,4·(0,56 (–2,175 – 23,961j) + 1) = -7,935-488,421j = 488,485·e89°j
F1(р3) = 36,4·(0,56(–2,175 + 23,961j) + 1) = -7,935+488,421j = 488,485·e-89°j
F1(р4) = 36,4·(0,56 (-1,746) + 1) = 0,81
Знайдемо вираз для оригіналу f(t) :
h(t)=1–0,0335е -130 t+0,49(е -2,175t+(0,272-23,961t)j+ е -2,175t-(0,272-23,961t)j)-0,0227e-1,746t
h ( t )=1–0,0 335 е - 130t –0, 0227 е - 1,746t +0, 245e - 2,175t × cos(-23,961t + 0,272 )
По одержаному аналітичному виразу будуємо графік.
Перехідна характеристика замкненої корегованої системи:
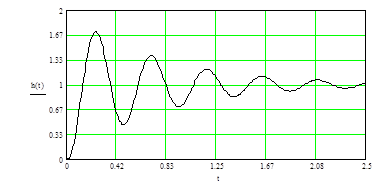
Рис. 9. Перехідна функція замкненої корегованої системи
Якість перехідного процесу характеризується величинами, які визначаємо з графіку:
- Час регулювання Трг = 1,4 с.
- Перерегулювання  = 20,52
= 20,52
- Логарифмічний декремент затухання d=ln(h2/h1)=ln(0,18/0,52)=–1,061
- Запас за фазою – Dy(w) = ½-180° - j(wс)½ = ½-180° – (-162°)½= 18°
- Запас за амплітудою – DL(w)=½L(w-180)½=12 ДБ ; (j(w-180) = -180°)
Список літератури
1. Васильєв Д.В. “Системи автоматического управления”, Москва, “Высшая школа”, 1983 г
2. Попович М.Г “Теорія автоматичного керування ” 1994р.
3. Галай М. В., Бреус М.І “Методичні вказівки по курсовому проектуванню з ТАК” Полтава, ПолТУ.
Дата добавления: 2019-07-15; просмотров: 161; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!