Реализация дискретных передаточных функций
Реферат
Предмет: Теория автоматического управления
Тема: Коррекция дискретных систем управления
Способы дискретной коррекции
Коррекция дискретных систем управления по сравнению с непрерывными системами, имеет ряд отличительных особенностей это, прежде всего, большее разнообразие методов и средств.
Как и для непрерывных систем используют последовательную и параллельную коррекцию.
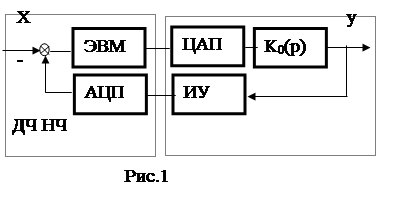
Для дискретных систем коррекция может быть выполнена за счет изменения как непрерывной, так и дискретной части системы (рис. 1).
 |
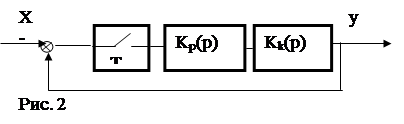
Коррекция непрерывной части. При последовательной коррекции непрерывной части корректирующее устройство включается в непрерывную часть контура управления, при этом корректирующее устройство меняет характеристики непрерывной части системы (рис. 2).
 |
Передаточная функция разомкнутой, непрерывной, скорректированной системы равна
 (1)
(1)
Передаточная функция замкнутой дискретной скорректированной системы равна
 (2)
(2)
Как видно из формулы, выделить передаточную функцию корректирующего звена в явном виде нельзя. Для определения передаточной функции корректирующего звена используют частотные методы.
Порядок расчета корректирующего звена для дискретной системы
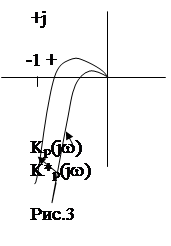
1. Строим АФХ не скорректированной разомкнутой непрерывной –Kp(j w ) и дискретной - K p* (j w ) систем. Так как прерывание ухудшает динамику, то АФХ разомкнутой дискретной системы хуже, чем непрерывной (ближе к критической точке).
2. Рассчитываем корректирующее устройство для непрерывной системы
3. Строим АФХ скорректированных систем (разомкнутой непрерывной и дискретной).
4. Строим переходный процесс и определяем показатели качества. Если он удовлетворяет требуемому, то корректирующее устройство выбрано удачно, в противном случае корректирующее устройство синтезируется методом последовательных приближений.
Достоинство метода: простота реализации корректирующего устройства.
Недостаток метода: сложно определить структуру корректирующего устройства.
 |
Коррекция при помощи дискретной цепи. При последовательной коррекции с помощью дискретной цепи корректирующее устройство меняет характеристики дискретной части системы (рис. 4).
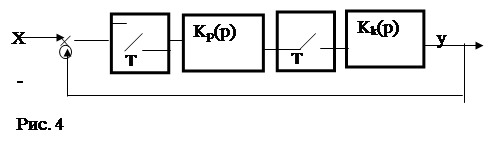 |
Передаточная функция замкнутой скорректированной системы равна
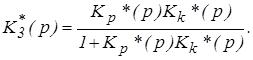 (3)
(3)
Применив метод билинейного преобразования, можно получить структуру передаточной функции корректирующего устройства в дискретной форме -Kk (z) аналогично, как и для непрерывных систем.
Передаточная функция корректирующего звена имеет вид
 (4)
(4)
Достоинство: простота определения структуры корректирующего звена.
Недостаток: сложность реализации структуры.
Реализация дискретных передаточных функций
Необходимость реализации дискретных передаточных функций может возникнуть при коррекции дискретных систем управления, при этом используются различные методы. Наиболее часто используют следующие методы: с помощью линий задержки; с помощью импульсных RC-цепей; с помощью методов цифрового моделирования (непосредственного, последовательного или параллельного программирования).
Дата добавления: 2019-07-15; просмотров: 217; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!