Расчет чистой реальной ценности проекта.
Ставка дисконтирования R берется в размере 20% с целью расширения деятельности фирмы.
Единовременные затраты - это сумма затрат на разработку системы и стоимости оборудования, которое используется на этапе производства.
Текущие затраты - это затраты нетто, то есть затраты за вычетом НДС, с учетом предполагаемой инфляции (20% во второй год, 17% - в третий).
Результат - это доход нетто, то есть доход за вычетом НДС, с учетом предполагаемой инфляции (20% во второй год, 17% - в третий).
Чистый доход - это разность между доходом нетто и затратами нетто.
Дисконтируемый чистый доход - это чистый доход, умноженный на соответствующий дисконтируемый множитель.
Реальная ценность проекта на конкретный год - это сумма чистых доходов за год плюс сумма чистых доходов за предыдущие годы за вычетом единовременных затрат.
Таблица чистой реальной ценности проекта.
| Показатели | Годы | |||
| О год | 1 год | 2 год | 3 год | |
| Единовременные затраты | 1 410 126 | --- | --- | --- |
| Текущие затраты | --- | 13 932 801 | 16 719 361 | 19 561 653 |
| Результат | --- | 16 666 000 | 19 999 200 | 23 399 064 |
| Чистый доход | --- | 2 733 199 | 3 279 839 | 3 837 412 |
| Дисконтируемый множитель | 1 | 0,833 | 0,694 | 0,578 |
| Дисконтируемый чистый доход | --- | 2 276 755 | 2 276 208 | 2 218 024 |
| Реальная ценность проекта | --- | 866 629 | 3 142 837 | 5 360 861 |
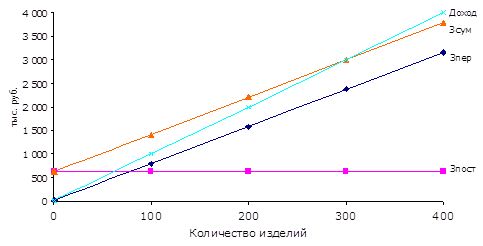
Расчет точки безубыточности.
Т без. = З.пост / (Ц.изд - З.пер. на 1 изд.);
где З.пост - это сумма расходов на заработную плату, отчисления во внебюджетные фонды, амортизацию, энергетические расходы.
|
|
|
З.пер - это сумма затрат на покупку комплектующих, транспортные расходы, прочие расходы.
Ц.изд - стоимость изделия, равная 10 000 руб.
Т без. = 625 964 / (10 000 - 7 884) = 296 изд.
|
Вывод: После выпуска 296 изделий предприятие начнет работать безубыточно.
Рис 3.3. График безубыточности
Вывод
Анализ внедрения системы автоматической стабилизации показывает, что производство данной системы рентабельно (R = 12,4%), а ее окупаемость наступает на первом же году производства.
Разработка системы автоматической стабилизации пневмоколесной платформы является актуальной и эффективной. Актуальность разработки заключается в том, что при современном уровне развития вычислительной техники существует возможность перейти от постоянного ручного контроля положения платформы оператором к автоматическому отслеживанию заданных параметров при помощи микропроцессорной системы управления.
Эффективность разработки системы автоматической стабилизации пневмоколесной платформы состоит в том, что она позволяет исключить ошибочные действия оператора, вызванные его утомлением, и повысить скорость восстановления безопасного горизонтального положения платформы при быстро меняющихся внешних условиях.
|
|
|
Таким образом, электронная система управления платформой позволит повысить технико-экономические показатели ТС для перевозки крупногабаритных и неделимых грузов.
Безопасность жизнедеятельности
Разработка алгоритма функционирования системы автоматической стабилизации при возникновении аварийных ситуаций
Введение
Цель и содержание БЖД - это обеспечение комфортных условий деятельности человека на всех стадиях его жизненного цикла и нормативно допустимых уровней воздействия отрицательных факторов на человека и природную среду.
Научные задачи БЖД сводятся к теоретическому анализу и разработке методов идентификации опасных и вредных факторов, генерируемых элементами среды обитания.
Практические задачи БЖД обусловлены выбором принципов защиты, разработкой и рациональным использованием средств защиты человека и природной среды от отрицательного влияния техногенных источников и стихийных явления, а также средств, обеспечивающих комфортное состояние среды жизнедеятельности.
Объект изучения БЖД - это комплекс явлений и процессов в системе "человек - среда обитания", отрицательно воздействующих на человека и природную среду.
|
|
|
Предметом изучения БЖД являются объективные закономерности возникновения опасных и вредных факторов в биосфере и техносфере.
В системе БЖД существует аксиома о потенциальной опасности. Это основополагающий постулат БЖД, который гласит: "Потенциальная опасность является универсальным свойством процесса взаимодействия человека со средой обитания на всех этапах его жизненного цикла".
Аксиома о потенциальной опасности предопределяет, что все действия человека и компоненты среды обитания, прежде всего технические средства, кроме многих положительных свойств обладают способностью генерировать опасные и вредные факторы. При этом любое новое позитивное действие или результат неизбежно сопровождаются возникновением новой потенциальной опасности или группы опасностей.
4.2. Конструктивные и эксплуатационные свойства,
обеспечивающие безопасность ТС
|
|


|
|









|
|
|
|
|
|
|
|
|
|
|
|
Безопасность транспортного средства включает в себя комплекс конструктивных и эксплуатационных свойств, снижающих вероятность возникновения дорожно-транспортных происшествий, тяжесть их последствий и отрицательное влияние на окружающую среду. Различают активную, пассивную, послеаварийную и экологическую безопасность транспортного средства (рис. 4.1.).
Рис. 4.1. Безопасность транспортных средств
Под активной безопасностью транспортного средства понимаются его свойства, снижающие вероятность возникновения дорожно-транспортного происшествия. Активная безопасность обеспечивается несколькими эксплуатационными свойствами, позволяющими водителю уверенно управлять автомобилем, разгоняться и тормозить с необходимой интенсивностью, совершать маневры, которые требует дорожная обстановка, без значительных затрат физических сил. Основные из этих свойств: тяговые, тормозные, устойчивость, управляемость, проходимость, информативность, обитаемость.
Под пассивной безопасностью транспортного средства понимаются его свойства, снижающие тяжесть последствий дорожно-транспортного происшествия. Различают внешнюю и внутреннюю пассивную безопасность автомобиля.
Основным требованием внешней пассивной безопасности является обеспечение такого конструктивного выполнения наружных поверхностей и элементов автомобиля, при котором вероятность повреждения человека этими элементами в случае дорожно-транспортного происшествия была бы минимальной.
Как известно, значительное количество происшествий связано со столкновениями и наездами на неподвижное препятствие. В связи с этим одним из требований к внешней пассивной безопасности автомобилей является предохранение водителей и пассажиров от ранений, а также самого автомобиля от повреждений с помощью внешних элементов конструкции.
К внутренней пассивной безопасности автомобиля предъявляются два основных требования:
- создание условий, при которых человек мог бы безопасно выдержать значительные перегрузки;
- исключение травмоопасных элементов внутри кузова (кабины).
Водитель и пассажиры при столкновении после мгновенной остановки автомобиля еще продолжают двигаться, сохраняя скорость движения, которую автомобиль имел перед столкновением. Именно в это время происходит большая часть травм в результате удара головой о ветровое стекло, грудью о рулевое колесо и рулевую колонку, коленями о нижнюю кромку щитка приборов.
Под послеаварийной безопасностью транспортного средства понимаются его свойства в случае аварии не препятствовать эвакуации людей, не наносить травм при эвакуации и после нее. Основными мерами послеаварийной безопасности являются противопожарные мероприятия, мероприятия по эвакуации людей, аварийная сигнализация.
Наиболее тяжелым последствием дорожно-транспортного происшествия является возгорание автомобиля. Чаще всего возгорание происходит при тяжелых происшествиях, таких как столкновение автомобилей, наезды на неподвижные препятствия, а также опрокидывание. Несмотря на небольшую вероятность возгорания (0,03… 1,2% от общего количества происшествий), их последствия тяжелейшие. Они вызывают почти полное разрушение автомобиля и при невозможности эвакуации - гибель людей.
Под экологической безопасностью транспортного средства понимается его свойство снижать степень отрицательного влияния на окружающую среду. Экологическая безопасность охватывает все стороны использования автомобиля. Ниже перечислены основные аспекты экологии, связанные с эксплуатацией автомобиля.
Потеря полезной площади земли. Земля, необходимая для движения и стоянки автомобилей, исключается из пользования других отраслей народного хозяйства. Общая протяженность мировой сети автомобильных дорог с твердым покрытием превышает 10 млн км, что означает потерю площади свыше 30 млн га. Расширение улиц и площадей приводит к увеличению территорий городов и удлинению всех коммуникаций.
Загрязнение атмосферы. Основная масса вредных примесей, рассеянных в атмосфере, является результатом эксплуатации автомобилей. Двигатель средней мощности выбрасывает в атмосферу за один день эксплуатации около 10 м3 отработавших газов, в состав которых входят окись углерода, углеводороды, окислы азота и многие другие токсичные вещества.
Использование природных ресурсов. На производство и эксплуатацию автомобилей расходуются миллионы тонн высококачественных материалов, что приводит к истощению их природных запасов. При экспоненциальном росте потребления энергии на душу населения, характерном для промышленно развитых стран, скоро наступит такой момент, когда существующие источники энергии не смогут удовлетворить потребности человека. Значительная доля потребляемой энергии расходуется автомобилями, к.п.д. двигателей которых составляет 0,3… 0,35. Следовательно, 65…70% энергетического потенциала не используется.
Шум и вибрации. Уровень шума, длительно переносимый человеком без вредных последствий, составляет 80…90 дБ. На улицах крупных городов и промышленных центров уровень шума достигает 120…130 дБ. Колебания почвы, вызываемые движением автомобилей, пагубно сказываются на зданиях и сооружениях.
Для защиты человека от пагубного влияния шума транспортных средств применяют различные приемы: совершенствование конструкции автомобилей, шумозащитные сооружения и зеленые насаждения вдоль оживленных городских магистралей, организация такого режима движения, когда уровень шума наименьший.
Уничтожение флоры и фауны. Автомобили, работающие вне дорог, уплотняют верхний слой почвы, разрушая растительный покров. Бензин и масла, пролитые на землю, приводят к гибели растений. Окислы свинца, содержащиеся в отработавших газах автомобилей, заражают деревья и кустарники. Плоды фруктовых деревьев, растущих вблизи дорог с интенсивным движением, нельзя употреблять в пищу. Ядовиты и цветы, растущие на разделительных полосах. Под колесами автомобилей ежегодно погибают тысячи животных, миллионы птиц, бесчисленное множество насекомых.
Радиопомехи. При работе системы зажигания автомобильного двигателя создаются радиопомехи. Для их подавления в системах зажигания предусмотрены специальные устройства. Правила дорожного движения запрещают эксплуатацию транспортного средства с неисправной системой подавления радиопомех.
Проектируемая система автоматической стабилизации предназначена, в частности, для установки на большегрузные транспортные средства, перевозящие крупногабаритные и опасные грузы. Масса, габариты и номенклатура перевозимых грузов очень разнообразны и достигают внушительных величин. В случае возникновения аварийных ситуаций при транспортировке тяжелых и опасных грузов риск нанести существенный ущерб людям, оборудованию и окружающей среде очень велик.
Постановка задачи
Требуется решить задачу сигнализации возникновения аварийных ситуаций при транспортировке грузов на пневмоколесной платформе.
Необходимо перечислить возможные варианты ситуаций, которые следует считать опасными для людей, груза и оборудования, проанализированы их признаки и методы обнаружения и разработать на основе этих предпосылок алгоритм функционирования системы автоматической стабилизации при возникновении аварийных ситуаций.
Решение задачи
Рассмотрим типичные ситуации при транспортировке грузов, которые следует считать аварийными.
Смещение центра тяжести груза. Возникает в случае воздействия на плохо закрепленный груз инерционных сил, внушительных ввиду большой массы перевозимого груза. Здесь возможны следующие опасности: разрушение элементов крепления груза, нарушение габаритных параметров транспортного средства и как крайний случай - частичное или полное обособление груза от платформы, сопровождающееся опасным разрушением перевозимого груза.
Крен опасной величины. Может быть отмечен на стадии загрузки пневмоколесной платформы ввиду неправильного расположения груза на платформе. Также подобная ситуация может возникнуть и как следствие смещения центра тяжести груза. Опасности здесь такие же, а риск потерять груз - еще выше.
Следует отметить, что возникновение подобных аварийных ситуаций в движении значительно опаснее, чем при неподвижной платформе. Инерционные силы и моменты, действующие на груз, существенно выше. Предупреждение и отслеживание аварийных ситуаций также сильно зависят от своевременных и корректных действий оператора пневмоколесной платформы.
Разработанную систему автоматической стабилизации необходимо дополнить вспомогательными датчиками, отслеживающими признаки возникновения вышеперечисленных аварийных ситуаций и элементами индикации опасности на пульте управления оператора.
Ключевыми признаками возникновения аварийных ситуаций будем считать следующие:
- Резкое изменение крена платформы в продольной, поперечной или обоих плоскостях одновременно (отслеживается программно на уже имеющейся элементной базе)
- Внезапная неспособность системы автоматической стабилизации выровнять крен платформы (отслеживается программно на уже имеющейся элементной базе)
- Изменение массы груза при движении, что свидетельствует о потери части груза или всего груза по той или иной причине. Для отслеживания данного параметра понадобится дополнить систему датчиком массы перевозимого груза.
Таким образом, будут задействованы уже имеющиеся в системе датчики крена грузовой платформы. Дополнительно в системе будет установлен датчик массы перевозимого груза.
На панели управления оператора в качестве индикации предлагаю продублировать визуальную информацию звуковым предупреждением, иначе говоря, дополнить контрольную лампу зуммером. Это гарантированно привлечет внимание оператора за наименьший промежуток времени. В критической ситуации выигрыш во времени является неоспоримым преимуществом.
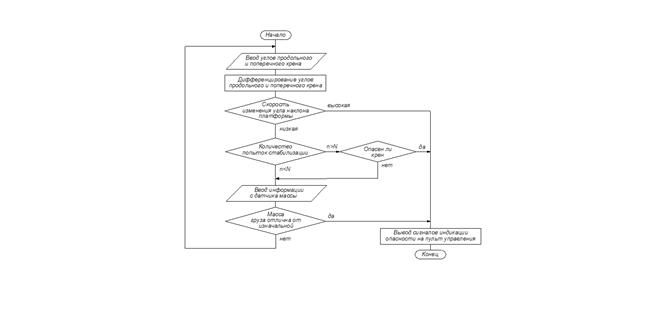 Рис. 4.2. Алгоритм функционирования системы автоматической стабилизации
Рис. 4.2. Алгоритм функционирования системы автоматической стабилизации
при возникновении аварийной ситуации
Разработанный алгоритм функционирования системы представлен на рис. 4.2.
Система работает следующим образом. На основании информации с датчиков продольного и поперечного крена рассчитывается скорость изменения угла наклона платформы, иными словами, сигналы с датчиков дифференцируются. Результат дифференцирования сравнивается с некоторым предельным значением скорости крена, который следует считать критерием опасности. Если вычисленная величина превышает критерий опасности, на пульт управления оператора выводится сигнал об опасности. В противном случае система переходит к следующему этапу своего функционирования.
На следующем этапе контролируется число попыток стабилизации платформы в горизонтальной плоскости. Многократные безуспешные попытки стабилизировать платформу свидетельствуют о возникновении аварийной ситуации. Если количество попыток превышает критерий опасности, система выводит на пульт оператора сигнал об опасности. В противном случае система переходит к следующему этапу своего функционирования.
В систему вводится информация с датчика массы перевозимого груза. При движении платформы неизбежны флуктуации показаний данного датчика, что обязательно должно учитываться при программной обработке сигнала. Если на основании пришедшей с датчика информации можно сделать вывод о том, что масса груза уменьшилась, на пульт управления оператора выводится сигнал об опасности и система прекращает свое функционирование. В противном случае система возвращается к первому этапу свой работы, и алгоритм повторяется снова.
Получив предупредительный сигнал, оператор пневмоколесной платформы должен приостановить движение платформы или осуществляемую операцию и максимально оперативно принять меры по обеспечению безопасности людей, груза и оборудования.
Вывод
В данном разделе был рассмотрен комплекс общих конструктивных и эксплуатационных свойств транспортных средств, снижающих вероятность возникновения дорожно-транспортных происшествий, тяжесть их последствий и отрицательное влияние на окружающую среду, а также опасности, возникающие при транспортировке крупногабаритных грузов на пневмоколесной платформе.
Перечислены возможные варианты ситуаций, которые следует считать опасными для людей, груза и оборудования, проанализированы их признаки и методы обнаружения. На основе этих предпосылок был успешно разработан алгоритм функционирования системы автоматической стабилизации, обеспечивающий в большинстве случаев гарантированное распознавание опасных ситуаций и своевременное предупреждение оператора.
Таким образом, разработанная система повышает безопасность эксплуатации пневмоколесных платформ для транспортировки крупногабаритных грузов.
5. Использованная литература
1. Аксенов П.В. Многоосные автомобили. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1989. - 280 с.: ил.
2. Аналоговые и цифровые интегральные микросхемы. Справочное пособие/С.В. Якубовский, Н.А. Барканов, Л.И. Ниссельсон и др.; Под ред. С.В. Якубовского. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1985. - 432 с., ил.
3. Вахминцев А.А. Автоматическая стабилизация пневмоколесной платформы для транспортировки крупногабаритных грузов в строительстве. Диссертация на соискание ученой степени кандидата технических наук. Москва, МАДИ, 1990.
4. Виглеб Г. Датчики: Пер. с нем. - М.: Мир, 1989. - 196 с., ил.
5. Горбунов В.Л., Панфилов Д.И., Преснухин Д.Л. Справочное пособие по микропроцессорам и микроЭВМ:/Под ред. Л.Н. Преснухина. - М.: Высш. шк., 1988. - 272 с.: ил.
6. Коноплянко В.И., Рыжков С.В., Воробьев Ю.В. Основы управления автомобилем и безопасность движения. - М.: ДОСААФ, 1989. - 224 с.: ил.
7. Микропроцессорные системы автоматического управления/ В.А. Бесекерский, Н.Б. Ефимов, С.И. Зиатдинов и др.; Под общ. ред. В.А. Бесекерского. - Л.: Машиностроение. Ленингр. отд-ние, 1988. - 365 с.
8. Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник. В 2 т. / В.-Б.Б. Абрайтис, Н.Н. Аверьянов, А.И. Белоус и др.; Под ред. В.А. Шахнова. - М.: Радио и связь, 1988.
9. Микросхемы памяти. ЦАП и АЦП: Справочник - 2-е изд., стереотип / О.Н. Лебедев, А-Й.К. Марцинкявичюс, Э.-А.К. Багданскис и др.; - М.: КубК-а, 1996 - 384 с.: ил.
10. Пахтер И.Х., Цейтлин Г.Д. Современные конструкции автопоездов-тяжеловозов. М., НИИНавтопром, 1974.
11. Петленко Б.И., Рожков В.М., Соколов В.Г. системы сбора, преобразования и передачи информации на автотранспорте. Виды информации и датчики на автомобиле: Учебное пособие/ МАДИ - М., 1989. - 86 с.
12. Пиковская А.Я., Рожков В.М., Соколов В.Г. Автомобильные системы сбора, преобразования и передачи информации. Преобразование сигналов автомобильных датчиков: Учебное пособие/ МАДИ-М., 1990. - 88 с.
13. Прокунцев А.Ф., Юмаев Р.М. Преобразование и обработка информации с датчиков физических величин. - М.: Машиностроение, 1992. - 288 с.: ил.
14. Сташин В.В. и др. Проектирование цифровых устройств на однокристальных микроконтроллерах/ В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. - М.: Энергоатомиздат, 1990. - 224 с.
15. Титов М.А. и др. Изделия электронной техники. Микропроцессоры и однокристальные микроЭВМ: Справочник / М.А. Титов, А.Ю. Веревкин, В.И. Валерьянов; Под ред. А.И. Ладика и А.И. Сташкевича. - М.: Радио и связь, 1994. - 120 с.: ил.
16. Щелкунов Н.Н., Дианов А.П. Микропроцессорные средства и системы. - М.: Радио и связь, 1989. - 288 с.: ил.
17. Электронные промышленные устройства: Учеб. для студ. вузов спец. "Пром. электрон."/ В.И. Васильев, Ю.М. Гусев, В.Н. Миронов и др. - М.: Высш. шк., 1988. - 303 с.: ил.
При разработке проекта также были использованы следующие ресурсы всемирной компьютерной сети Интернет:
1. http://avs.endtown.ac.ru/avs/doc/mps/index.html - Кафедра автоматизированных и вычислительных систем Воронежского государственного технического университета
2. http://dimasen.narod.ru - электрооборудование и датчики на автомобилях
3. http://dinistor.webzone.ru - научно-производственная и конструкторская фирма ООО НПКФ "Динистор", изготовитель командоаппаратов
4. http://elga5.narod.ru/index.html - сайт разработчика и изготовителя гидравлических компонентов
5. http://nauka.relis.ru/06/0109/06109066.ht m - Как перевозят тяжелые грузы. Журнал "Наука и жизнь"
6. http://old.siemens.ru - датчики производства фирмы Сименс
7. http://www.apz.nnov.ru/al_gr.htm - Арзамасский приборостроительный завод
8. http://www.autoelectric.ru - Устройства и программы для диагностики автомобильного оборудования
9. http://www.chipnews.ru - интернет-версия популярного журнала для специалистов по электронным компонентам
10. http://www.dvgups.ru/METDOC/GDTRAN/DEPEN/ELSN_TR/O_MIK_TEX/METOD/KDP/MP_KD3.htm - Кафедра микропроцессорных и управляющих систем Дальневосточного государственного университета путей сообщения
11. http://www.gpfk.ru/info_techlib.htm - техническая библиотека Горнопромышленной финансовой компании (ГПФК)
12. http://www.insynet.ru/Equipment/STS/STS_Catalog_2.html - технологические счётные датчики производства STS Electronics
13. http://www.mte.gov.ru/ntp/newoborud/newoborud.htm - Министерство энергетики Российской Федерации. Научно-технический прогресс. Новое оборудование.
14. http://www.nnov.rfnet.ru/rf - Автомобильная электроника
15. http://www.rlocman.com.ru/index.htm - информационный портал по электронике
16. http://www.rusttc.ru/niifi/rus - Научно-исследовательский институт физических измерений
17. http://www.sector-t.ru/info/compl/products/kipis/datch - каталог датчиков угловых и линейных перемещений
18. http://www.technopolus.ru/products.html - системы автоматики и промышленное оборудование
19. http://www.voskhod.nnov.ru/sgr.htm - секционные гидрораспределители Павловского машиностроительного завода "Восход"
20. http://www.zeim.ru/catalog/catalog.shtml - Завод электроники и механики (ЗЭИМ)
Приложение
Дата добавления: 2019-07-15; просмотров: 445; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!