Модуль 1: Организация работ и управленческие аспекты
Оценка взаимодействия и межличностного общения между членами команд, с соперниками и экспертами. Оценка организации рабочей деятельности. Оценивается по итогу каждого соревновательного дня
Модуль 2: Компетенции в области коммуникаций и межличностных отношений
Оценка журнал техника по мобильной робототехнике
Модуль 3: Проектирование
Оценка базовых действий робота
Модуль 4: Изготовление и сборка
Проверка робота на соответствие промышленным стандартам( качество изготовления и сборки, подсоединения проводов и т.д.)
Модуль 5: Манипулирование объектом в зоне прямой видимости
Командам, в режиме прямой видимости, необходимо захватить требуемые объекты и доставить в соответствующую зону выдачи согласно плану застройки соревновательного поля (Приложение 1).
Модуль 6: Манипулирование объектом в режиме телеуправления
Конкурсантам необходимо в режиме телеуправления захватить необходимые объекты и доставить в требуемую зону выдачи согласно плану застройки соревновательного поля (Приложение 1).
При отсутствии прямой видимости рабочее место оператора дистанционного управления включает как ноутбук, так и приемник камеры от первого лица. Видеосигнал от робота передается только на приемник камеры от первого лица.
Модуль 7: Автономный режим работы
Командам, в режиме автономной работы, необходимо захватить требуемые объекты и доставить в соответствующую зону выдачи согласно плану застройки соревновательного поля (Приложение 1).
|
|
|
Команды располагаются за компьютерным столом и могут видеть всю площадку для оценки эксплуатационных свойств.
Критерии оценки
В данном разделе определены критерии оценки и количество начисляемых баллов (субъективные и объективные) таблица 2. Общее количество баллов задания/модуля по всем критериям оценки составляет 100.
Таблица 2.
| Раздел | Критерий | Оценки | ||
| Judgment (если это применимо) | Объективная | Общая | ||
| А | Организация работ и управленческие аспекты | 3 | 4 | 7 |
| В | Компетенции в области коммуникаций и межличностных отношений | 10 | - | 10 |
| С | Проектирование | 0 | 7 | 7 |
| D | Изготовление и сборка | 6 | 0 | 6 |
| Е | Базовое программирование, тестирование и отладка | 0 | 20 | 20 |
| F | Анализ эффективности и ввод в эксплуатацию (телеуправление) | 0 | 10,6 | 10,6 |
| G | Анализ эффективности и ввод в эксплуатацию (автономный режим управления) | 0 | 15 | 15 |
| Итого = | 19 | 56,6 | 75,6 | |
Субъективные оценки - Не применимо.
|
|
|
Приложения к заданию
Приложение 1 План застройки соревновательного поля
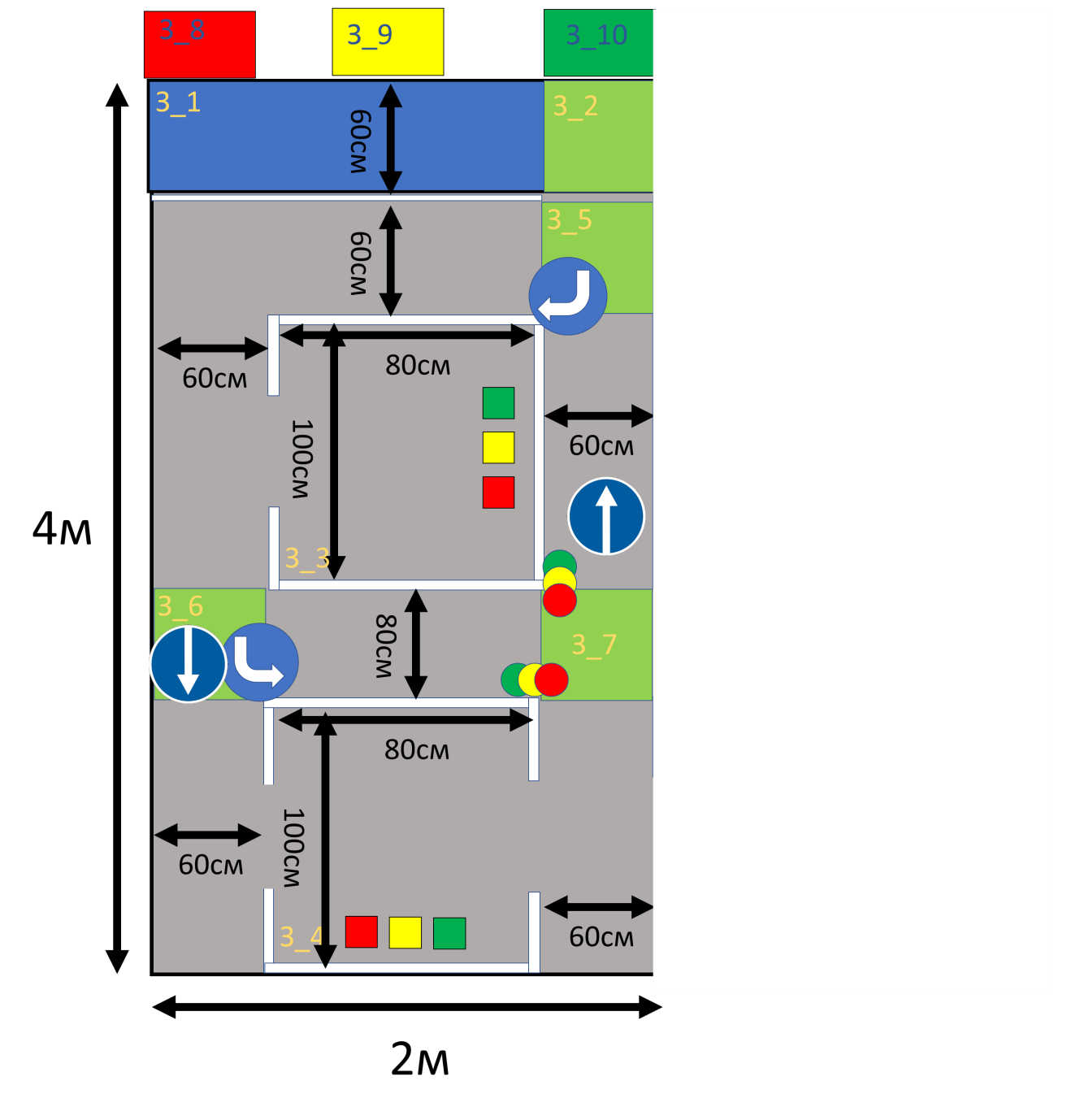
Квадраты, в которых находятся контейнеры, можно будет поворачивать в любую сторону, таким образом меняя карту поля. Знаки указывают путь к контейнерам, при несоблюдении указаний стрелки не зачисляются баллы. Зелёные квадраты – перекрёстки.
З_1 – зона сортировки
З_2 – старт и финиш
З_3 – З_4 – жилые комплексы
З_5 – З_6 – промежуточные позиции
З_8 – 3_10 – заводы по переработке мусора
1)Робот начинает движение из зоны 3_2
2)В зоне 3_5 робот совершает маневр в соответствии со знаком
3)В зоне 3_6(3_7) робот совершает маневр в соответствии со знаком
4)В зоне 3_7 робот двигается по зеленому сигналу светофора
5)Робот отвез мусор Первого типа
6)Робот отвез мусор Второго типа
5)Робот отвез мусор Третьего типа
Приложение 2 Определение разборки:
• Все двигатели, датчики и электрические компоненты должны быть в состоянии «при поставке».
• Конкурсанты должны собрать робота для чемпионата на месте его проведения в день С-1 чемпионата, который считается днем сборки / настройки робота.
• Конкурсантам разрешается использовать программные файлы, созданные в рамках подготовки к чемпионату при выполнении оцениваемых заданий на месте проведения чемпионата.
|
|
|
• День знакомства с рабочим местом (С-1) используется для сборки мобильного робота. Этот день так же предназначен для проверки наличия всех компонентов, узлов, проводов и инструментов, а также проверки работоспособности всех отдельных деталей (двигателей, датчиков и устройства управления) после транспортировки.
• В ходе дня С1чемпионата выполняется оценка конкурсантов по части (A) Проекта, (D) Изготовления и сборки и (B) Базового программирования, испытания и отладки (технический журнал).
• В ходе дней С2 – С3 будет оцениваться выполнение задач в условиях оценки производительности.
• На каждой конкурсной площадке предусматривается наличие одного поля размером 2х4 м (из расчета не более 3 команд на одно поле) .
Приложение 3 Коллекция компонентов: Разрешенные дополнительные компоненты
Максимально допустимая сумма на покупку дополнительных компонентов – 500 долларов США.
Использование участниками суммы свыше допустимой суммы в долларах США влияет на критерии оценки.
Конкурсанты ДОЛЖНЫ использовать коллекцию компонентов для чемпионата Studica WorldSkills Mobile Robotics Collection (WSR Юниор Mobile Robotics Set) в качестве основного источника для строительства / сборки / эксплуатации мобильного робота.
|
|
|
Конкурсанты ДОЛЖНЫ использовать «Журнал техника по мобильной робототехнике» для обоснования решений по закупке КАЖДОГО дополнительного компонента.
Конкурсанты НЕ МОГУТ закупать компоненты для прямой замены / модернизации предоставляемых компонентов. Пример: Предоставляются два двигателя с энкодером и команды должны использовать именно эти двигатели.
Необходимо соблюдать следующие ограничения, влияющие на проектирование и изготовление робота.
1. Система ДОЛЖНА быть спроектирована с использованием MyRIO в качестве основного устройства или только в качестве устройства обработки.
2. Программное обеспечение ДОЛЖНО быть разработано в среде LabVIEW.
3. Конкурсанты ДОЛЖНЫ использовать компоненты из коллекции для мобильной робототехники Studica WorldSkills Mobile Robotics Collection (WSR Юниор Mobile Robotics Set) в качестве основных элементов для рамы и опорной конструкции робота, представляемого на чемпионате.
4. Команды НЕ МОГУТ использовать гидравлическое или барометрическое давление.
5. Команды МОГУТ использовать любые датчики на свой выбор, при условии, что их характеристики не превосходят характеристики датчиков, представленных в коллекции компонентов. Дополнительные датчики должны быть учтены в разрешенной дополнительной сумме затрат 500 долларов США.
6. Команды могут использовать дополнительные электродвигатели и сервоприводы на собственное усмотрение, без ограничений по марке или количеству используемых двигателей и сервоприводов, при этом команды должны использовать предоставленные платы управления двигателями и не допускается использовать двигатели с большей мощностью, чем у предоставленных двигателей. Дополнительно закупаемые элементы управления будут учтены в разрешенной дополнительной сумме затрат 500 долларов США. В базовой юниорской комплектации присутствует 2 электродвигателя и 2 сервомотора.
7. Конкурсанты НЕ могут использовать серийные, имеющиеся в продаже, готовые к использованию непосредственно после покупки компоненты роботов, например, захваты и системы привода в сборе.
8. Команды ДОЛЖНЫ использовать предоставленные аккумуляторы.
9. Команды должны подготовить и привезти с собой все оборудование, программное обеспечение и ноутбуки, необходимые им в ходе чемпионата. Допускается использование 2 - х ноутбуков на рабочем месте. Допускается использование только одного ноутбука при работе на соревновательном поле.
Использование сотовых телефонов, смартфонов и иных средств мобильной связи и портативных устройств запрещено.
Команды ДОЛЖНЫ использовать собственную систему видео передачи для дистанционного управления в следующих вариантах:
1) Официальный набор WSR Viewpoint Camera Add-on Kit.
http://www.studica.com/ca/en/WorldSkills/wsr-robot-first-person-view-kit.html
2) Аналог официального набора со следующими параметрами:
А) Команды ДОЛЖНЫ использовать камеру дистанционного управления с максимальным углом обзора не более 160 градусов.
Б) Команды ДОЛЖНЫ использовать видео-передатчик камеры и приемник экрана дистанционного управления с частотой 5.8 ГГц с возможностью выбора переключения не менее 22 каналов.
В) Компоненты дистанционного управления, размещенные на роботе (FPV камера и передатчик) ДОЛЖНЫ использовать питание от батареи комплекта Studica WorldSkills Mobile Robotics Collection.
Г) Диагональ экрана оператора НЕ ДОЛЖНА превышать 7 дюймов.
| Все конструкционные по своей природе компоненты / элементы / детали, функция которых заключается в удержании / креплении функциональных элементов робота НЕ требуют учета в дополнительных суммах расходов на совершенствование эксплуатационных свойств робота.
Пример: Кронштейн, который был закуплен или изготовлен конкурсантом, и функциональным назначением которого является удержание линейного исполнительного механизма, не должен учитываться в перечне дополнительных затрат на совершенствование эксплуатационных свойств робота. | ||||
| Следующие компоненты считаются конструкционными и не учитываются в пределах суммы затрат 500 долларов США: | ||||
| Швеллеры и трубы | Профили, полученные штамповкой / балки | Фасонки | Тяги | Гусеницы |
| Пластины и кронштейны | Зажимные крепления | Крепежные детали | Дистанционные прокладки и распорки | Колеса / оси / ступицы |
| Монтажная арматура | Ремни и шкивы | Системы линейных направляющих | Крепеж | Шестерни, звездочки и цепи |
| Все компоненты / элементы / детали, напрямую влияющие на расширение функциональных способностей робота, помимо предоставляемых компонентов, ДОЛЖНЫ учитываться в перечне дополнительных затрат на совершенствование эксплуатационных свойств робота.
Пример: Линейный исполнительный механизм обеспечивает функциональную возможность перемещения вперед и назад и, поэтому, должен учитываться в перечне допустимых дополнительных изделий. | ||||
| Следующие позиции НЕ считаются конструкционными изделиями и должны быть учтены в сумме 500 долларов США | ||||
| Линейные исполнительные механизмы | Дополнительные датчики | Дополнительные двигатели | Захватное устройство | |
| Следующие позиции, не входящие в комплекты WS MR Collection (юниорский комплект), ЗАПРЕЩЕНЫ к использованию в конструкции робота | ||||
| Иные контроллеры двигателей и сервоприводов | Сторонние аккумуляторы | Микроконтроллеры | Модификаторы сигналов | Одноплатные компьютеры |
| Следующие позиции НЕ будут учтены в предельной сумме затрат 500 долларов США: | ||||
| Кабели, провода, разъемы | Защитный выключатель | Регуляторы напряжения | Электрические разъемы | Реле |
| Переключатели | Крепления для электроники | Монтажные платы | Изделия, изготовленные конкурсантом | Ходовые винты |
| Колеса | Изготовленная конкурсантом плата сопряжения с датчиками | Предоставленные конкурсантом элементы дистанционного управления | ||
Приложение 4 Решение с прямым видением с помощью двух камер / система управления объектами под дистанционным управлением
Решение с двумя камерами обеспечивает следующее:
а) Интеграция управления камерами во встроенном роботе MyRIO, поддерживающем мобильность в автономном режиме и функцию управления объектами без создания потенциальных помех для сигналов о взаимодействии с пространством чемпионата.
б) Возможность работы в режиме дистанционного управления, если робот находится НЕ в прямой видимости оператора, что является наиболее реалистичной рабочей ситуацией.
КАМЕРА ПОИСКА
Управление этой камерой осуществляется исключительно через Labview, при этом все изображения анализируются в роботе через MyRIO. Эта камера НЕ отправляет изображений к «устройствам вне робота». Эта камера напрямую задействована в процессе распознавания объектов на поле, а также выполняет управление дополнительными движениями, назначаемыми конкурсантом.
Таким образом, Labview и MyRIO получают полное управление над ресурсами обработки, назначенными для управления основными элементами, выполняющими задачу зрительного восприятия в рамках процесса поиска, без наложения ограничений на процесс отправки постоянного видеосигнала в режиме онлайн на ноутбук, расположенный вне робота.
КАМЕРА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
• Конкурсантам необходимо приобрести отдельную камеру с видом от первого лица и небольшой монитор / приемник с экраном диагональю 4,3 дюйма для использования при подготовке к чемпионату с целью поддержки дистанционного управления системой управления объектами БЕЗ прямой видимости робота или системы управления объектами.
• Конкурсантам необходимо принять решение по обеспечению питания этих камер.
• Для этих камер НЕ будет обеспечено взаимодействие с ноутбуками конкурсантов или с MyRIO.
• Эти камеры передают видеосигнал оператору дистанционного управления системой управления объектами.
После завершения выполнения задачи оператором дистанционного управления оператор использует устройство перемещения робота вперед для выполнения следующей последовательности автономных задач.
Приложение 5. Способность работы с целевым объектом
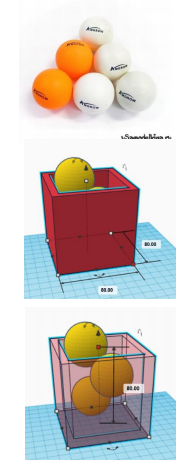
| «Мусор» - мяч (шарик) для настольного тенниса стандартного размера 38-40 мм в диаметре. «Контейнер для мусора» - пластиковая открытая сверху емкость в виде параллелепипеда размерами 80х80х80 мм с толщиной стенок 5 мм разных цветов. Конкурсанты разрабатывают / изготавливают и управляют системой управления объектами, которая имеет следующие характеристики: · Возможность автономного и дистанционного управления / функционирования. · Возможность функционирования при нахождении робота или системы управления объектами робота В ЗОНЕ прямой видимости или ВНЕ ЗОНЫ прямой видимости оператора. Система управления объектами совместно с роботом может одновременно контролировать не более чем ОДИН «контейнер для мусора». При ОТСУТСТВИИ прямой видимости рабочее место оператора дистанционного управления включает как ноутбук, так и приемник камеры от первого лица. Видеосигнал от робота для использования оператором в качестве визуального обзора передается ТОЛЬКО на приемник камеры от первого лица. При автономной работе и нахождении в зоне прямой видимости оператор дистанционного управления системой управления объектами располагается в установленном месте за компьютерным столом и может видеть всю площадку для оценки эксплуатационных свойств. |
Дата добавления: 2019-03-09; просмотров: 174; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!