Где - радиусы кривизны соответствующих траекторий абсолютного и относительного движения.
Касательное ускорение аВ' также задано (если щ=const, то аВ' =0). В этих двух уравнениях лишь два неизвестных, которые можно найти построением плана ускорений, используя правило сложения векторов.
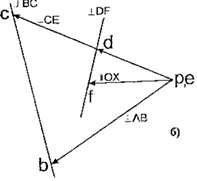
Решение векторных уравнений приведено на рис. 3, в.
;
Рис. 3 а)
в)
б)
Рис. 3




Отрезки , , соответствуют нормальным ускорениям в масштабе . Отрезки псс, пBb , пCBс пропорциональны тангенциальным ускорениям , причем отрезки пBb=аBt/мa,вычисляем предварительно, а отрезки псСB и псc позволяют определить искомые ускорения

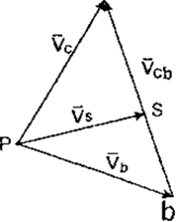
Ускорение любой другой точки на звене ВС, например точки S (рис.З, а), находят, используя теорему подобия:Отрезки прямых линий, соединяющие точки на схеме звена механизма, и отрезки прямых линий, соединяющие концы векторов относительных скоростей и ускорений этих точек на плане скоростей, образуют подобные, сходственно расположенные фигуры (рис.3, в).
bs = bc BS / BC и as = р s
При кинематическом исследовании механизма расчет и построение планов скоростей и ускорений начинаем от ведущего звена и затем производим расчет и построение по группам Ассура в порядке их присоединения.
Построение плана скоростей
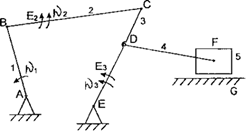
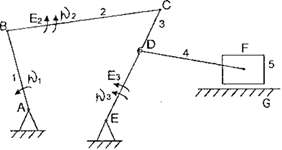
Построение плана скоростей рассмотрим на примере плоского шестизвенного механизма второго порядка (рис.4, а). Угловую скорость принимаем постоянной: W1 = const. Необходимо определить абсолютные скорости точек В, С, D, Fи относительные скорости звеньев VBC ,VCE ,VDF.
|
|
|
Определяем величину и направление скорости точки В. Так как ведущее звено 1 вращается с постоянной угловой скоростью, то линейная скорость точки В постоянна по модулю и равна
VB=W1LAB,
где LAB -длина звена АВ. Вектор скорости VB направлен по касательной к траектории движении, т.е. перпендикулярно АВ,в сторону вращения кривошипа АВ.
Выбрав полюс р и величину отрезка pb, изображающего вектор VB (рис.4),
определяем масштабный коэффициент плана скоростей

Откладываем отрезок рb абсолютной скорости точки В из полюса р перпендикулярно отрезку АВ. Обозначаем конец вектора стрелкой или буквой b.
2. Определяем скорости двухповодковой группы Ассура 2-3. Для каждой двухповодкой группы можно составить два векторных уравнения, связывающих скорость одной выбранной точки со скоростями двух других точек. В нашем примере известны скорости точек В и Е, к которым присоединена кинематическая группа ВСЕ. Следовательно, целесообразно рассмотреть связи точки С с точками В и Е.
По теореме о плоском движении связи между скоростями указанных точек могут быть представлены векторными уравнениями:

Векторы относительных скоростей и направлены по касательным к траекториям относительного движения, т.е. перпендикулярна СВ; перпендикулярна СЕ. Так как =0, то абсолютная скорость равна относительной скорости звена Поэтому в двух написанных уравнениях имеется лишь два неизвестных элемента - модули векторов и , которые могут быть определены построением плана скоростей.
|
|
|

Через точку b - конец найденного ранее отрезка pb плана скоростей (рис.4, б) - проводим линию, перпендикулярную направлению ВС, а из точки е, совпадающей с полюсом р,проводим линию, перпендикулярную СЕ. Пересечение указанных лучей обозначаем точкой с. Отрезок рс изображает абсолютную скорость точки C, отрезок bс - относительную скорость звена VCB. Величины этих скоростей находим по формулам:
Угловые скорости звеньев 2 и 3 определяем из выражений:
и
Направления угловых скоростей W2 и W3 могут быть определены следующим образом. Мысленно прикладывая векторы к точке С, видим, что вращение звеньев 2 и 3 происходит в направлении, обратном вращению часовой стрелки.
3. Для нахождения скорости точки D коромысла можно воспользоваться теоремой подобия для скоростей: Отрезки прямых линий, соединяющие точки на схеме звена механизма, и отрезки прямых пиний, соединяющие концы векторов относительных скоростей этих точек на плане скоростей, образуют подобные, сходственно расположенные фигуры. Фигура на плане скоростей повернута относительно фигуры схемы звена на 90 градусов.
|
|
|
Согласно теореме подобия, отрезок cd на плане скоростей подобен отрезку коромысла CD (рис.5,а), следовательно, положение точки D на векторе относительной скорости cdопределим из отношения отрезков cd/ce=CD/CE.
Соединяя найденную точку d (рис.4,б) с полюсом р плана скоростей, находим направление вектора pd скорости; модуль вектора определяется формулой:
4. Определим скорости двухповодковой группы Ассура 4-5. Связь между скоростями точек D, F, G устанавливается векторными уравнениями:
,

где - скорость точки F при вращении звена FD относительно точки D, направленная по касательной к траектории относительно движения, т.е. , перпендикулярна FD, - скорость точки F относительно стойки, направленная вдоль линии ОХ.
Через точку d проводим линию перпендикулярно направлению FD, а через полюс р - линию, параллельную ОХ.Пересечение указанных лучей обозначаем точкой f. Отрезок pf изображает абсолютную скорость точки f, а отрезок df -относительную скорость звена DF (рис.4, б).



Величины этих скоростей находим по формулам:
|
|
|
;
Угловую скорость звена DF находим из уравнения W4=VDF / LDF .
масштаб ведущий механизм абсолютное ускорение теорема подобия
· а)
· б)
· в)
г)
Рис. 4
Построение плана ускорений
Построение плана ускорений рассмотрим на примере того же положения механизма, для которого рассмотрено построение плана скоростей. Необходимо определить: абсолютные ускорения точек В, С, D, F и относительные ускорения звеньев СВ, СЕ, FD.
1. Определим величину и направление ускорения точки В:

Ускорение точки В при равномерном вращении ведущего звена равно нормальному ускорению:
aB = aBDn Ч Wl Ч LAB
Вектор нормального ускорения направлен вдоль прямой ВАот точки В к центру А. Выбрав полюс р и величину отрезка рb, изображающего вектор аB (рис. 2, б), определяем масштабный коэффициент плана ускорений
мa=аB / рb
Откладываем отрезок рb ускорения точки В из полюса рпараллельно направлению . Обозначаем конец вектора стрелкой и буквой b.
2) Определяем ускорения двухповодковой группы Ассура 2 - 3. Для этой группы Ассура можно составить два векторных уравнения, связывающих ускорения точки С с ускорениями точек В и Е, которые известны:



Величины в берем из плана скоростей. Нормальные составляющие ускорения всегда направлены к центру вращения. Тангенциальные составляющие уравнения всегда перпендикулярны нормальному. Так как аE=0, то в двух написанных уравнениях имеется лишь два неизвестных элемента - модули векторов и , которые могут быть определены построением плана ускорений.

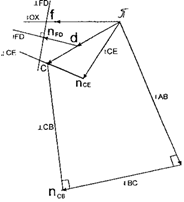
Через точку b (рис.4, в) ранее построенного отрезка рb плана ускорений проводим линию, параллельную ВС (рис.4, а), и откладываем на ней отрезок
,
направленный от точки С к центру В. Этот отрезок пропорционален нормальному ускорению с учетом выбранного масштаба.
Из точки е, совпадающей с полюсом р (рис.4 в), проводим линию, параллельную СЕ, и откладываем на ней отрезок

направленный от точки С к центру Е (рис.4, а). Отрезок пропорционален ускорению аCEn с учетом масштаба. Затем через точки пСB и пCE (рис.4,в) проводим лучи, перпендикулярные прямым ВС и СЕ. Точка с их пересечения будет искомой. Отрезок рc изображает полное ускорение ас, модуль которого равен . Отрезки спCB и спCE изображают ускорения аCBt и aCEt,модуль которых соответственно равен ,а отрезок cb - полное относительное ускорение аCB, модуль которого равен .
Угловые ускорения звеньев 2 и 3определяем по формулам



Направление их находим, мысленно перенося ускорение и в точку С (рис.4, а) и рассматривая движение точки С относительно В и Е. Угловые ускорения е2 и е3 направлены против часовой стрелки.

Согласно теореме подобия, отрезок cd на плане ускорений подобен отрезку CD на кинематической схеме механизма, следовательно, положение точки d на векторе относительного ускорения определится из соотношения отрезков cd / ce= CD / CE.
Соединяя найденную точку d с полюсом р плана ускорений, находим направление вектора рd. Модуль вектора определяется по формуле
aD= рd Ч мa.
3. Определяем ускорения группы Ассура 4 - 5. Связи между ускорениями точек D, F, G устанавливаются векторными уравнениями:


берем из плана скоростей;
=0, так как звено G (стойка) - неподвижно;

=0 - кориолисово ускорение точки G=0;

- относительное ускорение точки F (направлено вдоль линии ОХ).

В двух написанных уравнениях имеются лишь два неизвестных элемента - модули и , которые могут быть определены построением плана ускорений.
Через точку d - конец ранее найденного отрезка рd (рис.З, в) - проводим линию параллельно FD и откладываем на ней отрезок пFD, направленный от точки F к центру D. Через точку пFDt проводим перпендикулярную линию, так как вектор тангенциального ускорения aFDt всегда перпендикулярен нормальному.
Переходим к построению решения второго векторного уравнения. Для этого через полюс плана я-проводим линию ускорения aFDn, параллельную направлению движения ползуна F. Точка пересечения этой линии с перпендикуляром, проведенным через точку nFD, дает точку f. Соединяя найденную точку f с полюсом р плана ускорений, находим направление вектора рf. Модуль вектора определяем по формуле
aF=.
Угловое ускорение звена 4 находим по формуле(рис.4, а, в)
Пример 3
Проведем кинематический анализ кривошипно-ползунного механизма компрессора. Его схема показана на рис.5, а.
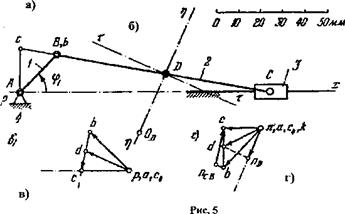
Рис. 5 Кинематический анализ кривошипно-ползунного механизма компрессора: а) схема, б) план положения, в) план скоростей, г) план ускорений
Напомним, что для проведения кинематического анализа необходимо знать количество звеньев, кинематических пар, групп Асура и т.д. Поэтому исследование механизма целесообразно начинать со структурного анализа.
Построим планы скоростей и ускорений кривошипно-ползунного механизма компрессора (рис. 5, а). Найдем скорость и ускорение точек C,D, угловую скорость и угловое ускорение шатуна ВС.
Дано: цl= 45°, LAB= 0,05м, LBC = 0,20м, LBD = 0,10м, угловая скорость кривошипа АВ постоянна и равна щ1= 80 сек-1 .
Решение
1) Проводим структурный анализ и устанавливаем класс заданного механизма. Число звеньев к = 4, число подвижных звеньев n = 3, число кинематических пар V класса р5 = 4, степень подвижности механизма равна
щ = Зп - 2р5 = 3 Ч 3 - 2 Ч 4 = 1
Механизм образован присоединением к ведущему звену АB и стойке 4 группы второго класса второго вида, состоящей из звеньев 2 и 3.
2) Строим план положения механизма (рис. 5, б). Задаемся длиной отрезка А В = 25 мм, вычисляем масштаб схемы механизма:
,
по нему находим длины отрезков ВС и BD:
По полученным размерам и заданному углу цl, строим план положения механизма (рис. 5, б)
3) Строим план скоростей для группы 2,3. Построение ведем по следующим двум векторным уравнениям:
,
где - скорость точки В, по модулю равная
VB = щl lAB = 80 Ч 0,05 = 4 мсек-1
и направленная перпендикулярно линии АВ в сторону, соответствующую направлению угловой скорости звена АВ; - скорость точки С при вращении звена ВС вокруг оси шарнира В, по модулю равная
VCB = щ2 lBC
( - угловая скорость звена ВС, которая пока нам неизвестна) и направленная перпендикулярно линии ВС;
- скорость точки С4 стойки 4, совпадающей с точкой С (она равна нулю, так как звено 4 неподвижно);



- относительная скорость точки С в ее движении относительно точки С4 (ее модуль неизвестен, а направлена она вдоль линии Ах).
Построение плана скоростей ведем в такой последовательности (рис.5, в). Строим решение первого векторного уравнения, указанного выше: от полюса роткладываем отрезок (pb), изображающий скорость точки В,перпендикулярно линии АВ и в соответствии с направлением вращения звена АВ, причем длину отрезка (pb) выбираем равной (АВ) = 25 мм, т. е. строим план в масштабе кривошипа; из точки b проводим направление скорости VCB - линию, перпендикулярную ВС. Переходим к построению решения второго векторного уравнения, указанного выше: из точки рнадо было бы отложить скорость, но она равна нулю, поэтому точку С4 совмещаем с точкой р; из точки С4 или, что тоже, из точки р проводим направление скорости - линию, параллельную Ах, до пересечения с линией, проведенной перпендикулярно ВС, и получаем точку с - конец вектора скорости точи С. Помещаем в полюс плана точку а и на этом заканчиваем построение плана скоростей для всего механизма. Скорость точки D находим по правилу подобия: вектор этой скорости должен делить отрезок (bc) в том же отношении, в каком точка D делит отрезок ВС, т.е.
Вычисляем масштаб плана скоростей:

Скорость VC точки С равна

Угловая скорость щ2 звена ВС равна

На рис.5, б построен повернутый план скоростей непосредственно на схеме механизма. В этом плане полюс рсовмещен с точкой А. Направление вектора скорости точки Всовпадает с направлением АВ, направление скорости VCBявляется продолжением линии ВС, а направление скорости точки С перпендикулярно линии А.
Строим план ускорений для группы 2,3. Этот план строится по таким двум векторным уравнениям:

и направленное параллельно линии АВ от точки В к точке А; - нормальное ускорение точки С во вращательном движении звена ВС относительно точки В, по модулю равное и направленное параллельно линии ВС от точки С к точке В.
- касательное ускорение точки С в том же движении звена ВС, по модулю равное
aCBl = е2 lBC ,
где е2 - угловое ускорение звена ВС, пока нам неизвестное и направленное перпендикулярно линии ВС;

- ускорение точки С4 (точка звена 4; оно равно нулю, так как звено 4 неподвижно);

- кориолисово ускорение точки С в движении ее относительно точки С4, равное нулю, потому что звено 4 неподвижно;

- относительное (релятивное) ускорение точки С в ее движении относительно точки С4, оно направлено вдоль линии Ах.
Построение плана ускорений ведем в такой последовательности (рис.5, г). Строим решение первого векторного уравнения, указанного выше, для чего от полюса плана р откладываем отрезок (рb), изображающий ускорение aВ, параллельно линии АВ. Длину (рb) выбираем равной (АВ)=25 мм, т.е. строим план в масштабе кривошипа, при этом масштабы планов ускорений соответственно будут равны

От точки b откладываем отрезок (bncn), изображающий ускорение . Длина отреза (bncn) вычисляется так:

Через точку nCB проводим направление ускорения - линию, перпендикулярную линии ВС.



Переходим к построению решения второго векторного уравнения, указанного выше. Для этого от полюса плана р откладываем вектор ускорения , но так как модуль его равен нулю, точка С4 совпадает с точкой р. С этой же точкой совпадает конец вектора ускорения - точка k (ускорение равно нулю). Из точки k или, что то же, из точки р проводим направление ускорения - линию, параллельную Ах. Точка пересечения ее с линией, проведенной перпендикулярно ВС, дает точку с - конец вектора ускорения точки С. Соединяем точки с и b и получаем вектор полного ускорения С при вращении звена ВС относительно точки В, т.е. аСВ. В точку рпомещаем точку а. На этом заканчиваем построение плана ускорений механизма. Конец вектора ускорения точки Dнаходим по правилу подобия:
Соединив точку d с полюсом плана р, получаем отрезок (рd), изображающий ускорение точки D. Величину ускорения точки С находим так:

а величина углового ускорения звена ВС

Таким образом, мы подробно рассмотрели задачи о построении скоростей и ускорений групп II класса первого и второго видов. Составление уравнений и построение планов скоростей и ускорений групп II класса других видов выполняется аналогично.
Порядок выполнения работ
1. Ознакомиться с выданной преподавателем кинематической схемой механизма.
Проверить наличие данных для решения задачи.
· 2. Вычертить кинематическую схему механизма с учетом выбранного масштаба.
· 3. Определить перемещение звеньев и траекторий, описываемых точками звеньев.
· 4. Построить план скоростей.
· 5. Построить план ускорений.
В отчете представить:
· 1) цель работы;
· 2) кинематическую схему;
· 3) построенный план механизма;
· 4) построенный план скоростей;
· 5) построенный план ускорений.
Контрольные вопросы:
· - Какие задачи решает кинематическое исследование механизма?
· - Какими способами производится кинематическое исследование механизма?
· - Что следует понимать под масштабом?
· - Для чего необходимо определение перемещения звеньев и траекторий, описываемых точками звеньев?
· - Что называется планом скоростей?
· - Что называется планом ускорений?
Контрольное задание:
Провести кинематическое исследование механизмов, приведенных в приложении.
Исходные расчетные данные
структурный кинематический схема механизм
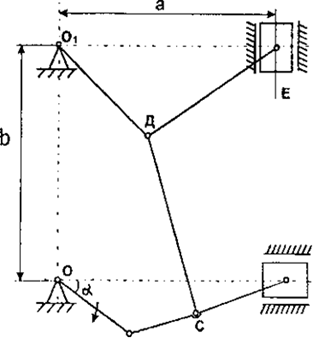
Параметры ползуна: геометрические размеры: масса кривошипа:
Fp =1.8 kH lO1A=120 мм lO2B = 364.4 m=1.2 кг
n=120об/мин b=173.2 мм
h=140 мм (Ход) a=600 мм
Практическая работа №16
Дата добавления: 2019-02-26; просмотров: 273; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!