Раздел 5 Структура и программное обеспечение адаптивных САУ
Тема 5.1 Структурные схемы адаптивных САУ.
Тема 5.2 Программное обеспечение адаптивных САУ.
Литература [ 2- 7].
Вопросы для самоконтроля
1. В чём заключается сущность адаптивного управления?
2. Каковы основные структурные схемы адаптивных САУ?
3. Каковы основные достоинства и недостатки адаптивных САУ?
4. Каковы основные алгоритмы адаптивного управления?
5. Какие основные методы синтеза алгоритмов адаптивного управления?
Темы практических занятий
При изучении дисциплины магистранты должны выполнить следующие практические занятия:
моделирование одноконтурной САУ;
моделирование адаптивной САУ.
Пример решения задачи контрольной работы
Задача:
определить оптимальные параметры настройки ПИД-регулятора типовой одноконтурной САР, S-модель которой показана на рисунке 1. 
Рисунок 1
Параметризацию регулятора выполнить методом Циглера-Николса (методом незатухающих колебаний) с помощью пакета расширения Simulink системы компьютерной математики MATLAB. Передаточная функция регулятора
 (1)
(1)
передаточная функция объекта регулирования
 , (2)
, (2)
|
|
|
где 
Решение:
1. Собрать S-модель САР согласно рис.1.
2. Настроить блоки Step, Sum, Transfer Fcn и Scope.
3. Блок PID C o ntrol ler настроить следующим образом:



что соответствует режиму П-регулятора.
4. Запустить модель.
5.На экране виртуального осциллографа Scope наблюдать переходную характеристику САР  см. рис.2.
см. рис.2.
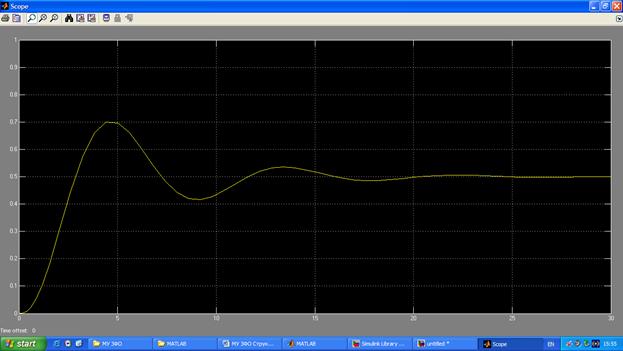
Рисунок 2
Выходная величина САР совершает затухающие колебания и, следовательно, САР - устойчива.
6. Увеличить коэффициент усиления регулятора до значения 
7. Запустить модель.
8.На экране виртуального осциллографа Scope наблюдать переходную характеристику САР  см. рис.3.
см. рис.3.
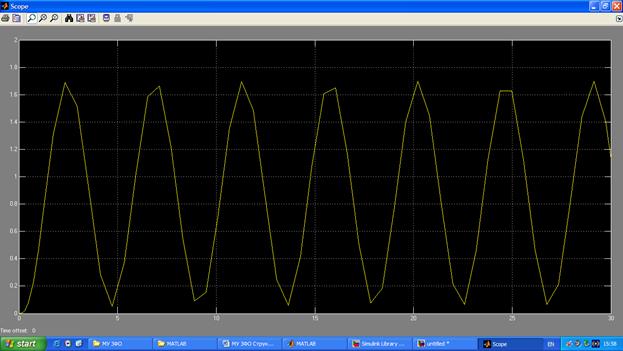
Рисунок 3
Выходная величина САР совершает незатухающие колебания (автоколебания) и, следовательно, САР находится на границе устойчивости.
9. Принять предварительно критическое значение коэффициента усиления регулятора 
|
|
|
10. Определить период автоколебаний T. Согласно шкале времени (оси абсцисс) 
11. Определить оптимальные параметры настройки ПИД-регулятора по формулам
 (3)
(3)

12. Увеличить коэффициент усиления регулятора до значения 
13. Запустить модель.
14. На экране виртуального осциллографа Scope наблюдать переходную характеристику САР см. рис.4.

Рисунок 4
Выходная величина САР совершает расходящиеся колебания, что свидетельствует о неустойчивости САР и подтверждает вывод п.8 о границе устойчивости.
15. Блок PID C o ntrol ler настроить следующим образом согласно (3):



что соответствует режиму ПИД-регулятора.
16. Запустить модель.
17. На экране виртуального осциллографа Scope наблюдать переходную характеристику оптимизированной САР см. рис.5.

|
|
|
Рисунок 5
Выходная величина САР с ПИД-регулятором совершает затухающие колебания и, следовательно, САР - устойчива.
18. Передаточная функция ПИД-регулятора согласно (1)

19. Определить декремент затухания d. Согласно рис.5  ,
,  и
и  , следовательно,
, следовательно,

20. Определить степень затухания  . С учётом результатов расчёта в п.19
. С учётом результатов расчёта в п.19
Как и следовало ожидать, переходный процесс характеризуется слабым затуханием. Это главный недостаток метода незатухающих колебаний. К достоинствам метода относят его простоту.
Дата добавления: 2019-02-26; просмотров: 137; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!