Трансформаторные преобразователи
МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
Электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра РАПС
ДОКЛАД
По дисциплине «Элементы систем автоматики»
Тема: Электромагнитные преобразователи перемещения. Сельсины. Индикаторный режим работы.
| Студент гр. 5403 | Костин В.С. | |
| Преподаватель | Пожидаев А.К. |
Санкт-Петербург
2018
ЗАДАНИЕ
На реферат
| Студент Костин В.С. | ||
| Группа 5403 | ||
| Тема реферата: Электромагнитные преобразователи перемещения. Сельсины. Индикаторный режим работы.
| ||
| Исходные данные: Требуется раскрыть содержание темы «Электромагнитные преобразователи перемещения. Сельсины. Индикаторный режим работы.», рассмотрев следующие вопросы по данной теме: индуктивные преобразователи, трансформаторные преобразователи, сельсины. | ||
| Предполагаемый объем реферата: Не менее 15 страниц (обязательны разделы «Содержание», «Введение», «Заключение», «Список использованных источников»). | ||
| Дата выдачи задания: 03.09.2018 | ||
| Дата сдачи реферата: 12.10.2018 | ||
| Дата защиты реферата: 12.10.2018 | ||
|
| ||
| Студент(ка) | Костин В.С. | |
| Преподаватель | Пожидаев А.К. | |
Аннотация
Целью данного доклада является раскрыть содержание темы «Электромагнитные преобразователи перемещения. Сельсины. Индикаторный режим работы.», рассмотрев следующие вопросы по данной теме: индуктивные преобразователи, трансформаторные преобразователи, сельсины.
Summary
The purpose of this report is to reveal the content of the topic "Electromagnetic displacement transducers. Selsyns. Indicator mode of operation."by considering the following questions on this topic: inductive transducers, transformer converters, synchro.
Содержание
| Введение | 4 | |
| 1. | Электромагнитные преобразователи перемещения | 5 |
| 1.1. | Назначение и типы | 5 |
| 1.2. | Индукционные преобразователи | 0 |
| 1.3 | Трансформаторные преобразователи | |
| 2. | Сельсины | 0 |
| 2.1. | Общие сведения и классификация | 0 |
| 2.2. | Индикаторный режим работы сельсинов | 0 |
| 2.3 | Применение сельсинов | |
| 2.4 | Производители сельсинов | |
| Заключение | 0 | |
| Список использованных источников | 0 | |
Введение
На сегодняшний день электромагнитные преобразователи перемещения, а в частности сельсины, получили широкое распространение в различных отраслях промышленности - они просты в использовании, доступны, с экономической точки зрения, долговечны.
Электромагнитные преобразователи перемещения
Назначение и типы
Электромагнитные преобразователи перемещения служат для преобразования линейного или углового перемещения в изменение индуктивности катушки  или в изменение взаимной индукции
или в изменение взаимной индукции  между двумя или несколькими катушками, что приводит к изменению вторичного напряжения. Электромагнитные преобразователи перемещения, преобразующие перемещения в величину индуктивности, называются индуктивными преобразователями, а преобразующие в величину взаимной индукции называются трансформаторными преобразователями.
между двумя или несколькими катушками, что приводит к изменению вторичного напряжения. Электромагнитные преобразователи перемещения, преобразующие перемещения в величину индуктивности, называются индуктивными преобразователями, а преобразующие в величину взаимной индукции называются трансформаторными преобразователями.
Электромагнитные преобразователи имеют следующие достоинства: простота и дешевизна конструкции, механическая прочность, высокая надежность за счет возможности съема выходного сигнала без скользящих контактов (кроме контактных сельсинов), возможность питания от промышленной сети частотой 50 Гц, возможность получения достаточно высокой мощности выходного сигнала, возможности работы как в диапазоне малых (доли мм), так и больших (метры) перемещений.
К недостаткам электромагнитных преобразователей следует отнести влияние на выходной сигнал внешних электромагнитных полей и частот питающего напряжения, а также возможность работы только на переменном токе.
Индуктивные преобразователи
Принцип действия простейшего индуктивного преобразователя поясняет рисунок 1. Индуктивный преобразователь представляет собой магнитную цепь, состоящую из катушки 1 со стальным сердечником 2, подвижного якоря 3 и двух воздушных зазоров  .
.
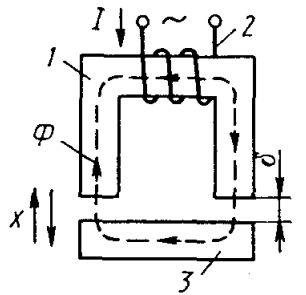
Рисунок 1 – Простейший индуктивный преопразователь
При питании переменным током полное сопротивление магнитной цепи:
 ,
,
где  – активное сопротивление катушки преобразователя;
– активное сопротивление катушки преобразователя;  – угловая частота питающего напряжения; – индуктивность катушки.
– угловая частота питающего напряжения; – индуктивность катушки.
Индуктивность катушки в рассматриваемом преобразователе приближенно определяется по формуле:

где  – число витков катушки;
– число витков катушки;  – магнитная проницаемость воздушного зазора;
– магнитная проницаемость воздушного зазора;  – площадь воздушного зазора; – длина воздушного зазора.
– площадь воздушного зазора; – длина воздушного зазора.
Из приведенного выше следует, что при перемещении якоря изменяется длина воздушного , что вызывает изменение индуктивности катушки.
Описанный одинарный индуктивный преобразователь имеет ряд недостатков: нелинейную функцию преобразования; значительную силу притяжения якоря; аддитивные погрешности, в частности погрешность, вызванную температурным изменением активного сопротивления обмотки.
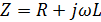
Устранение этих недостатков достигается использованием дифференциальных индуктивных преобразователей. Дифференциальный индуктивный преобразователь представляет собой совокупность двух одинарных индуктивных преобразователей с общим якорем (Рис. 2).
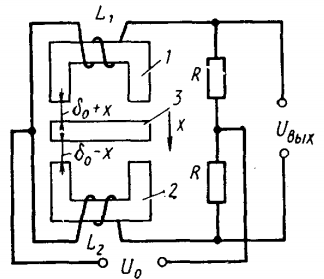
Рисунок 2 – Мостовая схема дифференциального преобразователя
На практике одинарные преобразователи нашли применение в качестве бесконтактных датчиков положения и концевых выключателе при управления механизмами, имеющим значительные перестановочны усилия. В таки схема автоматик наиболее полно проявляются достоинства одинарны индуктивных датчиков: простота конструкции и высокая надежность.
Дифференциальные преобразователи используются для измерения малых перемещений; они имею начальный зазор порядка 0,3—1 мм.
Для измерения больших перемещений применяю индуктивные датчики в виде катушек с подвижным внутренним сердечником. Если сердечник полностью введен внутрь катушки, на которую на мотан обмотка, т. е индуктивно сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника и катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Индуктивные преобразователи в вид катушке перемещающимся внутри нее сердечником получил название плунжерных. Пример использования плунжерного преобразователя показан на рисунке 3, где 1 – катушка, 2 – сердечник, 3 – разделительная трубка из немагнитной стали.
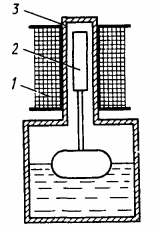
Рисунок 3 – Плунжерный преобразователь
Также особенностью плунжерных преобразователей, как это видно из рисунка 3, является возможность вывода перемещения из замкнутого объема, что является преимуществом перед дифференциальными и одинарными индуктивными преобразователями, которым он уступает в чувствительности.
Трансформаторные преобразователи
Принцип действия трансформаторных преобразователей основан на изменении взаимной индукции обмоток при перемещении якоря. Магнитные системы трансформаторных преобразователей такие же, как и у индуктивных. Отличие заключается лишь в том, что добавляется ещё обмотка одна, с которой и снимается выходной сигнал. Благодаря этому в трансформаторных преобразователей отсутствует непосредственная электрическая связь между цепью питания и измерительной цепью. Существует связь лишь за счет магнитного поля, что позволяет выбором числом витков выходной обмотки получит любой уровень выходного напряжения.
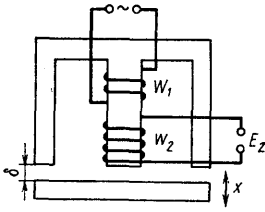
Рисунок 4 – Трансформаторный преобразователь линейных перемещений
На рисунке 4 показан трансформаторный преобразователь с подвижным якорем. Обмотка  , питается напряжением
, питается напряжением  , которое создает в магнитопроводе переменный магнитный поток Ф. Во вторичной обмотке
, которое создает в магнитопроводе переменный магнитный поток Ф. Во вторичной обмотке  индуцируется
индуцируется  , значение которого определяется по следующей формуле:
, значение которого определяется по следующей формуле:
 ,
,
где  – ток обмотки , а – взаимная индуктивность двух обмоток, которая приближенно определяется по формуле:
– ток обмотки , а – взаимная индуктивность двух обмоток, которая приближенно определяется по формуле:
Из приведенного выше следует, что магнитная система рассматриваемого трансформаторного преобразователя аналогична индуктивным преобразователям, а, следовательно, имеет те же недостатки, в частности нелинейную функцию преобразования. Данные недостатки также можно устранить использованием дифференциальных трансформаторных преобразователей.
Более широкое применение в системах автоматики получили трансформаторные преобразователи с подвижными обмотками. Простейший пример такого преобразователя показан на рисунке 5, где магнитопровод неподвижен и состоит и ярма 1 сердечника 2. Обмотка , размещена на ярме 1, и запитана переменным напряжением , и создает в зазоре между ярмом 1 и ферромагнитным сердечником 2 переменный магнитный поток Ф, амплитудное значение которого неизменно. В зазоре с равномерным распределением индукции размещена поворотная рамка 3 с вторичной обмоткой , в которой индуцируется ЭДС , определяемая в данном случае по формуле:
где  – угол поворота рамки 3.
– угол поворота рамки 3.

Рисунок 5 – Трансформаторный преобразователь углового перемещения
Такие преобразователи получили распространение для дистанционных передач показаний различных приборов под названием ферродинамических преобразователей. К ним относят сельсины, вращающиеся трансформаторы, индуктосины. Недостатком ферродинамических преобразователей является зависимость выходного сигнала от колебаний напряжения и частот питания.
Сельсины
Дата добавления: 2019-02-22; просмотров: 1315; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!