Связь структурной схемы с дифференциальным уравнением
Элементарные типовые звенья сложных систем управления и их реализация в приложении MatLab – Simulink
Описание систем.
Непрерывные процессы, протекающие в системах управления, могут быть описаны обыкновенными дифференциальными уравнениями с соответствующими начальными условиями. Тогда если известен входной сигнал, выходной сигнал определяется в результате решения задачи Коши для обыкновенного дифференциального уравнения.
Одномерная линейная нестационарная система управления описывается дифференциальным уравнением:
 (1)
(1)
с начальными условиями:
x(t0)=x0, x’(t0)=x0’,…, x(n-1)(t0)=x0(n-1)
где g(t) – входной сигнал, x(t) – выходной сигнал, t – текущее время, ai(t) и bj(t) (где i=1,..,n а j=1,…,m) – коэффициенты, m и n заданные числа, t0 – момент подачи входного сигнала.
Если коэффициенты уравнения постоянны, система называется линейной стационарной:
 (2)
(2)
в операторной форме уравнение (1) имеет вид:
D(p,t)x(t)=M(p,t)g(t)
Где p оператор дифференцирования  , D(p,t) и M(p,t) – дифференциальные операторы левой и правой части уравнения (1)
, D(p,t) и M(p,t) – дифференциальные операторы левой и правой части уравнения (1)

уравнение (2) в операторной форме принимает вид:
D(p)x(t)=M(p)g(t)
 Из операторной формы уравнения следует способ изображения стационарной системы на структурных схемах:
Из операторной формы уравнения следует способ изображения стационарной системы на структурных схемах:
Сложные системы управления, как правило, состоят из элементарных и типовых звеньев.
Приведем некоторые из них:
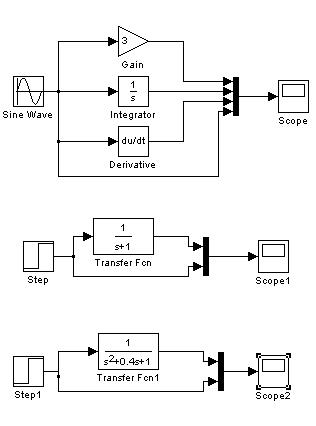
Усилительное звено
Описывается уравнением: x(t)=K(t)g(t), где К коэффициент усиления, которым может быть равен const если звено стационарное
|
|
|
Изображение на структурной схеме:
 |
Пример:
Трансформатор Uвых(t)=KUвх(t)
Дифференцирующее звено
Описывается уравнением  (3)
(3)
Операторная форма: x(t)=pg(t)
 Изображение на структурной схеме:
Изображение на структурной схеме:
- Интегрирующее звено
Описывается уравнением  (4)
(4)
Операторная форма: px(t)=g(t) или x(t)=1/pg(t)
 Изображение на структурной схеме:
Изображение на структурной схеме:
Пример:
Изменение угловой скорости ω диска с моментом инерции J под действием управляющего момента внешних сил M из состояния покоя
Уравнение вращательного движения:
 Отсюда получаем
Отсюда получаем 
Замечание вышеупомянутые звенья называются элементарными, так как их нельзя получить через другие.
- Апериодическое звено
Описывается уравнением  (5)
(5)
где число T называют постоянной времени.
Операторная форма: (Tp+1)x(t)=pg(t)
Изображение на структурной схеме:
 |
Пример:
Схема с заданным сопротивлением R и емкостью С (в начальный момент времени емкость не заряжена)
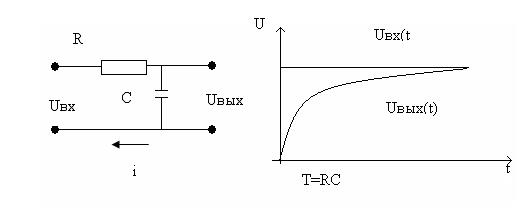
требуется составить дифференциальное уравнение, описывающее поведение системы, и найти выходное напряжение при условии подачи на вход постоянного напряжения единичной величины. Запишем уравнение второго закона Кирхгофа, соотношения связывающие ток и напряжение на емкости, и начальные условия:
|
|
|
Uвых+iR=Uвх
i=C 
Uвых(t0)= Uвых(0)=0
Отсюда следует
Используя обозначения T=RC, x=Uвых, g=Uвх , получаем уравнение вида (5)
Если g(t)=Uвх(t)=1(t), то решение имеет вид:
x(t)=1-e(-t/T)
Колебательное звено
Описывается уравнением  (6)
(6)
где число T называют постоянной времени, ξ – коэффициент демпфирования, |ξ|<1.
Изображение на структурной схеме:
 |
Пример:
Схема с заданным сопротивлением R индуктивностью L и емкостью С (в начальный момент времени емкость не заряжена, так же ток в цепи отсутствует). Требуется составить дифференциальное уравнение, описывающее изменение выходного напряжения.
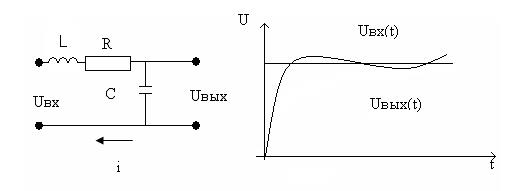
Запишем уравнение второго закона Кирхгофа, соотношения связывающие ток и напряжение на емкости, и начальные условия:

Отсюда

по сравнению с (6) здесь: T=  , ξ=
, ξ=  , Uвых=x, Uвх=g
, Uвых=x, Uвх=g
Все вышеперечисленные звенья можно реализовать в системе Simulink следующим образом:
Связь структурной схемы с дифференциальным уравнением
|
|
|
Структурные схемы строятся с помощью элементарных, типовых звеньев и сумматоров, описывающих преобразование сигналов. Они служат одним из языков описания систем управления. По структурным схемам, как правило, находится эквивалентный оператор системы управления, а затем решаются различные задачи анализа.
Алгоритм построения структурной схемы
- выразить член со старшей производной из дифференциального уравнения и представить полученное соотношение с помощью сумматора, дифференцирующих и усилительных звеньев.
- все низшие производные получить как сигналы на соответствующих выходах последовательно интегрирующих звеньев
- начальные условия представить как постоянные во времени воздействия, приложенные на выходах интегрирующих звеньев
Пример:
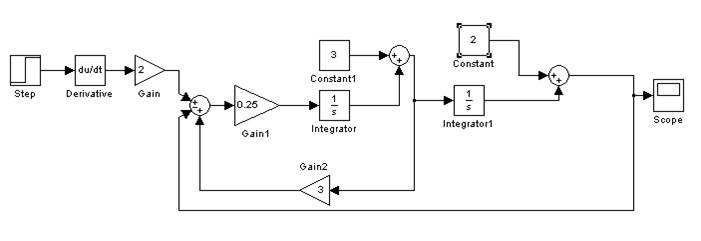
Построить структурную схему системы, описываемой дифференциальным уравнением
4x’’-3x’+x=2g’
с начальными условиями x(0)x0, x’(0)=x’0
Решение:
Выразим из уравнения член со старшей производной
4x’’=2g’+3x’-x
Изобразим схему получения сигнала 4x’’. С помощью усилительного звена с коэффициентом усиления ¼ получим сигнал x’’. построим прямую цепь схемы, последовательно преобразовывая сигналы x’’ интегрирующими звеньями. Добавляя на выходах интегрирующих звеньев соответствующие начальные условия, получаем часть прямой цепи схемы, в которой присутствует выходной сигнал и его производные x’, x’’. Изображаем сумматор, выходным сигналом которого служит 4x’’. На этом сумматоре нужно реализовать равенство 4x’’=2g’+3x’-x. Для этого добавляем к прямой цепи соединение дифференцирующего и усилительных звеньев, которые из входного сигнала g позволяют получить нужный сигнал 2g’ на входе сумматора. Сигналы x и 3x’ подаем на сумматор с соответствующим знаком, используя обратные связи, и получаем необходимую структурную схему:
|
|
|
В среде Simulink данная схема реализовывается следующим образом:
Дата добавления: 2019-01-14; просмотров: 1092; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!