Работа выполняется в присутствии преподавателя (лаборанта).
Nbsp;
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к практическим занятиям на стенде
«Исследование двигателя постоянного тока
последовательного возбуждения»
Для студентов всех форм обучения специальности 0634 – ЭАПУ
Пермь - 2005
ЛАБ0РАТ0РНАЯ РАБОТА № 1
ИССЛЕДОВАНИЕ ВНЕШНИХ И МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСЛЕДОВАТЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
ЦЕЛЬ РАБОТЫ: получение опытным и расчётным путем внешних (скоростных) и механических (естественных и искусственных) характеристик при различных способах регулирования скорости двигателя постоянного тока с последовательным возбуждением, изучение графо-аналитического метода расчёта пускового реостата.
Основные теоретические положения
Для двигателя последовательного возбуждения, принципиальная схема включения которого представлена на рис. I, уравнение скоростной характеристики, так же как и для двигателя независимого возбуждения, имеет следующий вид:
 ,
,
где R - суммарное сопротивление якорной цепи, состоящее из сопротивления обмотки якоря, обмотки дополнительных полюсов, обмотки возбуждения и внешнего сопротивления реостата.
В отличие от двигателя независимого возбуждения, здесь магнитный поток Ф является функцией тока якоря I. Эта зависимость, приведенная на рис. 2 носит название кривой намагничивания. Так как нет точного аналитического выражения для описания кривой намагничивания из-за сложности учёта влияния реакции якоря и насыщения машины, то трудно получить и точное аналитическое выражение для механической характеристики двигателя последовательного возбуждения.
Если для упрощения анализа предположить, пренебрегая насыщением магнитной системы, линейную зависимость между потоком и током якоря, как это показано пунктиром на рис. 2, т.е. считать что момент двигателя
 ,
,
где  - коэффициент пропорциональности между током и потоком (
- коэффициент пропорциональности между током и потоком (  ), то отсюда следует, что
), то отсюда следует, что
 .
.
Подставляя данное выражение для магнитного потока в общее уравнение механической характеристики двигателя постоянного тока

получим

или
 , (1)
, (1)
где
 ,
,  .
.

Рис. 1. Схема включения Рис.2. Кривая намагни-
двигателя постоянного тока чивания двигателя
последовательного возбуждения

Рис.3. Универсальные характеристики двигателей
Постоянного тока последовательного возбуждения
Таким образом, при ненасыщенной магнитной цепи двигателя механическая характеристика изображается кривой, для которой ось ординат является асимптотой. Особенностью механической характеристики двигателя последовательного возбуждения является её большая крутизна в области малых значений момента.
Значительное увеличение скорости при малых нагрузках обуславливается соответствующим уменьшением магнитного потока.
Уравнение (1) даёт лишь общее представление о механической характеристике двигателя последовательного возбуждения. При расчётах этим уравнением пользоваться нельзя, т.к. машин с ненасыщенной магнитной системой обычно не строят. Вследствие того, что действительные механические характеристики сильно отличаются от кривой, выраженной уравнением (I), построение характеристик приходится вести графо-аналитическими методами. Чаще всего построение искусственных характеристик производится на основании данных каталогов, где приводятся естественные характеристики:  и
и  .
.
Для серии двигателей определенного типа эти характеристики могут быть даны в относительных единицах  и
и  . Такие характеристики, называемые универсальными, представлены на рис. 3.
. Такие характеристики, называемые универсальными, представлены на рис. 3.
Отметим, что в каталогах даётся зависимость момента на валу двигателя от тока. При построении механических характеристик принимается зависимость скорости от электромагнитного момента. Это практически допустимо ввиду небольшой разницы между электромагнитным моментом и моментом на валу.
Для построения искусственных (реостатных) характеристик можно воспользоваться методом граничной характеристики.
Уравнение естественной характеристики
 (2)
(2)
где

или

В случае  эта зависимость принимает вид
эта зависимость принимает вид

Соответствующая характеристика называется граничной. Пологая, что на естественной и граничной характеристиках величина тока одна и та же, можно записать

Как следует из этого выражения, для нахождения точек граничной характеристики необходимо значения скорости на естественной характеристике умножить на отношение напряжения сети к э.д.с. двигателя при данном токе.
Уравнение электромеханической характеристики при введенном в цепь якоря последовательном сопротивлении  будет
будет
 (3)
(3)
При делении (3) на (2) получим

отсюда
 (4)
(4)
или в относительных единицах
 (5)
(5)
Здесь  - суммарное сопротивление якорной цепи в относительных единицах.
- суммарное сопротивление якорной цепи в относительных единицах.
 ;
;  ;
;  ;
;  .
.
Порядок построения скоростной реостатной характеристики сводится к тому, что задаваясь некоторыми произвольными значениями тока, например,  , по имеющейся каталожной естественной характеристике находят
, по имеющейся каталожной естественной характеристике находят  . Затем по формуле (5) при определенном
. Затем по формуле (5) при определенном  , (для которого строится реостатная характеристика) и том же определяет искомое значение
, (для которого строится реостатная характеристика) и том же определяет искомое значение  . Таким же образом для других значений
. Таким же образом для других значений  определяют искомые величины скорости
определяют искомые величины скорости  и т.д. На рис. 4 показаны естественная характеристика двигателя последовательного возбуждения (
и т.д. На рис. 4 показаны естественная характеристика двигателя последовательного возбуждения (  ) и реостатная, построенная по указанному методу (
) и реостатная, построенная по указанному методу (  ).
).
Пользуясь кривой  на рис. 3 и построенными скоростными характеристиками, легко получить по точкам кривые
на рис. 3 и построенными скоростными характеристиками, легко получить по точкам кривые  , т.е. механические характеристики двигателя.
, т.е. механические характеристики двигателя.
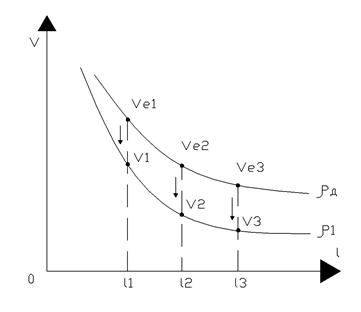
Рис.4. Естественная и реостатная характеристики двигателя
Постоянного тока последовательного возбуждения

Рис.5. К расчёту сопротивлений пускового реостата
С увеличением сопротивления скорость двигателя при том же моменте уменьшается, и характеристика смещается вниз. Жесткость характеристики при этом уменьшается с ростом дополнительного сопротивления в якорной цепи. Особенностью механических характеристик двигателя последовательного возбуждения является невозможность получения режима идеального холостого хода.
При нагрузке ниже 15-20% номинальной работа двигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря.
Расчёт величины сопротивлений для пуска двигателей последовательного возбуждения может быть произведен следующим графоаналитическим методом, не требующим построения реостатных скоростных характеристик двигателя.
Воспользуемся естественной характеристикой двигателя  и, отметив на ней точки допустимых токов при переключении с одной ступени реостата на другую
и, отметив на ней точки допустимых токов при переключении с одной ступени реостата на другую  и
и  (рис. 5), проведем через эти точки пунктиром две параллельных линии до пересечения с вертикалью Ah точках h и g. Вертикаль Ah расположена влево от начала координат на расстоянии ОА , соответствующем внутреннему сопротивлению двигателя
(рис. 5), проведем через эти точки пунктиром две параллельных линии до пересечения с вертикалью Ah точках h и g. Вертикаль Ah расположена влево от начала координат на расстоянии ОА , соответствующем внутреннему сопротивлению двигателя  . Откладываем в том же масштабе отрезки
. Откладываем в том же масштабе отрезки  и
и  .
.
Соединяя точки а и g , а также i и h получаем две прямые, характеризующие линейную зависимость между скоростью вращения двигателя и сопротивлением его якорной цепи при неизменном токе якоря. Последнее вытекает из выражения

Для определения числа пусковых ступеней и величины их сопротивлений поступают следующим образом.
Проводят вертикаль через точку а до пересечения с линией ih в точке в. Затем через точку в проводят линию, параллельную оси абсцисс, до точки с на линии ад. Аналогично проводятся линии cd и dе. Построение считается удачным, если последняя горизонталь проходит через точку д. Если этого не произойдёт, то построение следует повторить, изменив наклон одной из прямых а g или ih за счёт выбора новых значений  и
и  (чаще изменяют только ).
(чаще изменяют только ).
На рис. 5 дано построение с числом ступеней реостата, равный трем. Из построения ясно, что отрезок вс соответствует сопротивлению первой ступени реостата, a dе – второй, fg – третьей. В момент пуска (при  ) ток в якоре будет равен , а сопротивление всей якорной цепи
) ток в якоре будет равен , а сопротивление всей якорной цепи  . При разгоне двигателя до скорости
. При разгоне двигателя до скорости  ток уменьшается, а величина сопротивления якорной цепи не изменяется. В точке в сопротивление то же, но ток равен . Затем при
ток уменьшается, а величина сопротивления якорной цепи не изменяется. В точке в сопротивление то же, но ток равен . Затем при  происходит шунтирование первой ступени, общее сопротивление якорной цепи становится соответствующим отрезку сс1, а ток вновь достигает значения и т.д., пока двигатель не начнет работать на естественной характеристике.
происходит шунтирование первой ступени, общее сопротивление якорной цепи становится соответствующим отрезку сс1, а ток вновь достигает значения и т.д., пока двигатель не начнет работать на естественной характеристике.
Устройство стенда краткое описание
Для снятия внешних (скоростных) и механических характеристик при различных способах регулирования скорости используется установка, собранная по схеме рис. 6.
Исследуемым двигателем является машина постоянного тока с последовательным возбуждением. Техническая характеристика исследуемого двигателя (М):
Тип……………………………………..МТ – 2
Часовая мощность, кВт……………….2,4
Часовой ток, А…………………………77
Скорость, об/мин………………………900
Данный тип двигателей используется на производстве в качестве приводных машин шахтных электровозов малой мощности. Конструктивная особенность М заключается в том, что обмотка последовательного возбуждения машины расщеплена на две полуобмотки (ОВ1; ОВ2). С целью получения семейства механических характеристик М, начало и конец (К1, КК1; К2, КК2) соответствующих полуобмоток выведены на клеммную колодку. Выбор схемы включения полуобмоток а значит и характеристика М изменяются путем переключения пятиступенчатой рукоятки КК2. Питание М может осуществляться от расположенных в корпусе стенда неуправляемого выпрямителя (режим реостатного управления) или широтно-импульсного преобразователя (ШИП). Режимы работы стенда (реостатное управление командоконтроллером / широтно-импульсное управление) меняются в зависимости от положения рукоятки КК1. Выбор режима осуществляется путем установки рукоятки КК1 в соответствующее положение. Включение силового пускателя осуществляется только при «0» положении рукоятки КК1. Коммутационным аппаратом, объединяющим в себе КК1; КК2 служит командоконтроллер типа ККВ. Номинальный ток ККВ составляет 120 А.
Питание силовой схемы осуществляется выпрямленным напряжением 45 вольт от понижающего трансформатора и неуправляемого выпрямителя.
При включении рукоятки КК1 в режим «ШИП» исследуемый двигатель подключается к выходу блока ШИП и задание частоты вращения осуществляется переменным резистором на панели. При этом рукоятка КК2 должна быть установлена в положение «1».
При включении рукоятки КК1 в режим «КК», частота вращения исследуемого двигателя определяется положением рукоятки КК2 (см схему рис. 6.). Изменение частоты вращения в этом режиме происходит ступенчато, причем первое положение рукоятки КК2 соответствует минимальной частоте вращения, а пятое - максимальной. Переключение режима работы стенда ШИП – КК, и обратно, возможно только при «0» положении КК2.

Машина постоянного тока (Г) с обмоткой независимого возбуждения используется в качестве нагрузочной. Якорная цепь и обмотки возбуждения Г выведены в шкаф тиристорного преобразователя (ТЕР). Реверсивный тиристорный агрегат ТЕР4-63/460Н, модифицирован для работы в составе стенда. Как элемент автоматизированного электропривода в замкнутой по току системе автоматического регулирования частоты вращения якоря Г, ТЕР может обеспечивать заданный диапазон и точность регулирования напряжения, подаваемого на якорь. Обратные связи в ТЕР позволяют работать в режиме поддержания постоянного момента, независимо от развиваемой скорости. В шкафу ТЕРа также находятся добавочные сопротивления (РР). Функционально РР предназначены для снижения тока якоря Г.
Для создания нагрузки, двигатель Г переведен в режим противовключения. Обмотки якоря и возбуждения Г включены так, что моменты вращения машин направлены в противоположные стороны.
Двухмашинный агрегат (ЭМА) собран на одной раме, момент нагрузки на исследуемый двигатель передается посредством муфтового соединения валов. Для наглядности, на рисунках 7,8 приведены механические характеристики машин, входящих в состав электромашинного агрегата.
Для контроля и измерения величин токов, напряжения и частоты вращения используются приборы с попеременной индикацией значений по каналам. Модифицированные цифровые двухканальные приборы, с попеременной индикацией значений по каналам, типа «Термодат» (ТД) установленны на лицевой панели стенда. Отображение и контроль величины напряжения осуществляется по первому каналу; второй канал – используется для измерения токов.
Порядок выполнения работы
К работе допускаются студенты, прошедшие инструктаж по технике безопасности и ознакомившиеся с методическим пособием по проведению работ на стенде «Привод постоянного тока с двигателем последовательного возбуждения».
Работа выполняется в присутствии преподавателя (лаборанта).
Подача напряжения на силовые цепи и цепи управления осуществляется путем включения автоматических выключателей в распределительном шкафу ШР2. Контроль наличия напряжения осуществляется соответствующими сигнальными лампами. Готовность к работе определяется по наличию световой сигнализации в соответствующих цепях.
Запуск стенда осуществляется нажатием кнопки «Пуск» при нулевых положениях ручек КК1 и КК2.
Включение силового пускателя контролируется соответствующей световой сигнализацией и показаниями приборов.
1. Работа стенда в режиме ШИП:
- рукоятка КК1 устанавливается в положение ШИП.
- рукоятка КК2 устанавливается в положение 1.
- регулятором на панели управления устанавливается необходимая частота вращения исследуемого двигателя. При этом автоматически, для предотвращения превышения максимальной частоты вращения, нагрузочным двигателем создается минимальный тормозной момент.
- регулятором ТЕРа устанавливаем необходимый момент на валу.
- при окончании переходного процесса, по показаниям приборов ТД, производится снятие точки статической характеристики.
2. Работа стенда в режиме командоконтроллера:
- рукоятка КК1 устанавливается в положение «КК».
- рукоятка КК2 устанавливается в положение 1.
- регулятором ТЕРа устанавливаем необходимый момент на валу.
- при окончании переходного процесса, по показаниям приборов ТД, производится снятие точки статической характеристики.
Далее производятся те же операции, при установке рукоятки КК2 в положения 2,3,4 и 5. При этом изменяется схема токопрохождения контроллера. См. рис.7
3. Снятие характеристик при шунтированной обмотке возбуждения двигателя
Порядок проведения работы аналогичен п. I, но при этом обмотка возбуждения шунтируется сопротивлением Rш.ов., путем включения контактора КМ2 (кнопка расположена на панели стенда). Рукоятка КК2 командоконтроллера устанавливается в положение 4, (обмотки возбуждения соединяются последовательно).
4. Снятие характеристики при шунтированной обмотке якоря
В данном опыте обмотка якоря шунтируется сопротивлением Rш.я. путем включения контактора КМ3 (кнопка расположена на панели стенда). Рукоятка КК2 командоконтроллера устанавливается на 4-ю позицию.
5. Снятие характеристики при шунтированных якоре и обмотке возбуждения двигателя
Обмотка возбуждения шунтируется сопротивлением Rш.ов. путем включения контактора КМ2, обмотка якоря шунтируется сопротивлением Rш.я. путем включения контактора КМ3. Рукоятка КК2 командоконтроллера устанавливается в положение 4.
6. Снятие характеристик в режиме динамического торможения с самовозбуждением
В этом режиме исследуемый двигатель отключается от сети (кнопка «Стоп») и замыкается на сопротивление Rш.я (КМ3 включен).
Результаты измерений заносятся в таблицу. По табличным данным строятся графики электромеханических характеристик исследуемого двигателя.

Рис.7 Развёрнутые схемы токопрохождения командоконтроллера ККВ.
ПРИЛОЖЕНИЕ
Пример I. Построить естественную и искусственные характеристики для двигателя постоянного тока последовательного возбуждения.
Паспортные данные двигателя: 
Найти также величины дополнительных сопротивлений, включаемых в цепь якоря для снижения скорости при  до 400 об/мин (41,8 рад/сек) и
до 400 об/мин (41,8 рад/сек) и
200 об /мин (20,9 рад/сек). Построить реостатные характеристики при включении найденных сопротивлений.
Радение. Естественную характеристику рассчитываем, пользуясь кривыми, приведенными на рис. 3. При этом  ,
,  ,
,  ,
,  = 630 об/мин
= 630 об/мин
 = 66 рад/сек), тогда
= 66 рад/сек), тогда
 ;
;  ;
; 
Результаты расчётов сведены в таблицу 1.
Таблица 1.

| 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 |

| 37,6 | 56,4 | 75 | 94 | 113 | 131 | 150 | 169 | 188 |

| 1,6 | 1,23 | 1,09 | 1,0 | 0,94 | 0,89 | 0,85 | 0,81 | 0,78 |

| 105,8 | 81 | 71,8 | 66 | 62,1 | 58,7 | 56 | 53,3 | 51,5 |

| 1010 | 775 | 686 | 630 | 593 | 560 | 535 | 510 | 492 |
Естественная характеристика может быть построена по данным этой табл.1.
Номинальное сопротивление двигателя

Коэффициент полезного действия двигателя при номинальной нагрузке

Сопротивление обмотки якоря

Сопротивление последовательной обмотки возбуждения приблизительно равно

Внутреннее сопротивление двигателя

Положив в уравнение (4) и решив его относительно Rp , получим

Добавочное сопротивление, необходимое для снижения скорости до 41,8 рад/сек

Добавочное сопротивление, необходимое для снижения скорости до 20,9 рад/сек

Расчёт реостатных характеристик произведем по формуле

где  - скорость определяемая для данного тока
- скорость определяемая для данного тока  по естественной характеристике.
по естественной характеристике.
Результаты расчётов сведены в таблицу 2.
По данным таблицы 2. могут быть построены реостатные характеристики двигателя.
Таблица 2.
|
| 37,4 | 56,4 | 75 | 94 | 113 | 131 | 150 | 169 | 188 |

| 106 | 81 | 71,8 | 66 | 62 | 58,6 | 56 | 53,4 | 51,5 |

| 91,6 | 64,6 | 51,6 | 41,8 | 34 | 27 | 20,2 | 13,5 | 7,0 |

| 79,5 | 50,2 | 34,2 | 20,9 | 9,8 | -0,66 | -11,1 | -21,3 | -31,6 |
Пример 2. Для двигателя последовательного возбуждения рассчитать пусковой реостат. Пуск двигателя производится в три ступени.
Решение. Естественная характеристика двигателя построена в примере I. Выбираем значение максимального пускового тока  . Значение тока переключения
. Значение тока переключения  определяется после нескольких предварительных проб.
определяется после нескольких предварительных проб.
Тогда
 ;
;
 .
.
Проводим вспомогательные прямые  при
при  и при
и при  (рис. .5).
(рис. .5).
Величины сопротивлений ступеней пускового реостата и значения скоростей переключения определяются графически.
Сопротивление первой ступени  = 0,43 Ом ;
= 0,43 Ом ;
сопротивление второй ступени  = 0,28 Ом ;
= 0,28 Ом ;
сопротивление третьей ступени  = 0,19 Ом.
= 0,19 Ом.
Полное сопротивление пускового реостата

СОДЕРЖАНИЕ ОТЧЁТА
Отчёт должен содержать:
1. Схему лабораторной установки, паспортные ЭМА и приборов.
2. Опытные и расчётные данные, сведенные в таблицу согласно программе работы, и соответствующие графические зависимости  при различных режимах работы двигателя.
при различных режимах работы двигателя.
3. Расчёт пускового реостата графоаналитическим методом.
4. Выводы.
Список литературы
- Андреев В.П., Сабинин Ю.А. Основы электропривода – 2-е изд. Перераб. и доп. – М.-Л.: Госэнергоиздат, 1963
- Агрегаты тиристорные серий ТЕ, ТП, ТЕР: Паспорт ОДЖ. 468 353. – Чебоксары, 1984
- Многоканальный регулятор температуры «Термодат – 11М2» модель 11М2/2УВ/2Р/485i/64к: Инструкция по настройке. – Пермь, 2005
Дата добавления: 2018-11-24; просмотров: 153; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!